



йҡҸзқҖиҲ№иҲ¶ж—ҘзӣҠеӨ§еһӢеҢ–гҖҒжёҜеҸЈеҗһеҗҗйҮҸдёҚж–ӯеўһеҠ пјҢиҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙжҲҗдёәжңӘжқҘйӣҶиЈ…з®ұз ҒеӨҙеҸ‘еұ•зҡ„еҝ…然и¶ӢеҠҝпјҢеӣ жӯӨи¶ҠжқҘи¶ҠеӨҡзҡ„еӯҰиҖ…ејҖе§Ӣз ”з©¶еҰӮдҪ•жҸҗй«ҳйӣҶиЈ…з®ұиЈ…еҚёж•ҲзҺҮпјҢд»ҘжҸҗеҚҮз ҒеӨҙзҡ„иҝҗиҗҘж•ҲзҺҮгҖӮ
з ҒеӨҙиҝҗиҗҘж•ҲзҺҮдёҺAGVи°ғеәҰзӯ–з•ҘгҖҒз ҒеӨҙиЈ…еҚёе·ҘиүәгҖҒеҗ„дёӘи®ҫеӨҮд№Ӣй—ҙзҡ„е·ҘдҪңиЎ”жҺҘжөҒзЁӢеҜҶдёҚеҸҜеҲҶгҖӮйЎ¶еҚҮAGVзҡ„дҪҝз”ЁеҸҜд»ҘдҪҝAGVдёҺиҮӘеҠЁеҢ–иҪЁйҒ“еҗҠпјҲARMGпјүд№Ӣй—ҙе®һзҺ°жҹ”жҖ§иЎ”жҺҘпјҢеҮҸе°‘дёӨиҖ…д№Ӣй—ҙдә’зӣёзӯүеҫ…зҡ„ж—¶й—ҙгҖӮиҜ„д»·еҗ„з§ҚиЈ…еҚёе·ҘиүәжҳҜеҗҰйҖӮеҗҲз ҒеӨҙдҪңдёҡгҖҒиғҪеҗҰжҸҗй«ҳз ҒеӨҙдҪңдёҡж•ҲзҺҮйңҖиҰҒиҖғйҮҸеӨҡз§ҚжҢҮж ҮпјҢдҫӢеҰӮд»»еҠЎз»“жқҹж—¶й—ҙгҖҒеІёжЎҘд№Ӣй—ҙд»»еҠЎйҮҸзҡ„еқҮиЎЎжҖ§гҖҒеІёжЎҘзӯүеҫ…ж—¶й—ҙгҖҒAGVжҖ»зҡ„移еҠЁж—¶й—ҙгҖҒеңәжЎҘжҖ»зҡ„移еҠЁж—¶й—ҙзӯүгҖӮд»»еҠЎз»“жқҹж—¶й—ҙеҶіе®ҡиҲ№иҲ¶зҰ»жёҜж—¶й—ҙпјҢеІёжЎҘд№Ӣй—ҙд»»еҠЎйҮҸзҡ„еқҮиЎЎжҖ§еҶіе®ҡиЈ…еҚёдҪңдёҡиҝҮзЁӢдёӯжҳҜеҗҰжңү瓶йўҲзҺ°иұЎеҮәзҺ°гҖӮиҝҷдәӣжҢҮж Үд№Ӣй—ҙзӣёдә’еҲ¶зәҰпјҢе…ұеҗҢеҪұе“Қз ҒеӨҙиҝҗиҗҘж•ҲзҺҮпјҢеӣ жӯӨеҝ…йЎ»з»ҹзӯ№е…јйЎҫеҗ„дёӘжҢҮж ҮпјҢи®ҫзҪ®зӣёеә”зҡ„жқғйҮҚд»ҘиҫҫеҲ°жңҖдјҳиө„жәҗй…ҚзҪ®гҖӮ
1иҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёе·ҘиүәжөҒзЁӢ
иҮӘеҠЁеҢ–з ҒеӨҙиЈ…еҚёе·ҘиүәжөҒзЁӢдёәеІёжЎҘ←→AGV←→ARMGгҖӮеҜ№дәҺеҚёиҲ№д»»еҠЎпјҢеІёжЎҘе°ҶйӣҶиЈ…з®ұиЈ…иҪҪеҲ°жҢҮе®ҡAGVдёҠпјҢз”ұAGVж°ҙе№іиҝҗиҫ“еҲ°е ҶеңәдёӯдәӨз”ұARMGж”ҫз®ұпјӣеҜ№дәҺиЈ…иҲ№д»»еҠЎпјҢARMGе°ҶйӣҶиЈ…з®ұиЈ…иҪҪеҲ°жҢҮе®ҡAGVдёҠпјҢз”ұAGVж°ҙе№іиҝҗиҫ“еҲ°еІёжЎҘдҪңдёҡеҢәдәӨз”ұеІёжЎҘиЈ…иҲ№гҖӮеҰӮжһңйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘпјҢеҚійҮҮз”ЁйЎ¶еҚҮAGVпјӣеҰӮжһңдёҚйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘпјҢеҚійҮҮз”Ёдј з»ҹAGVгҖӮ
з ҒеӨҙж°ҙе№іиҝҗиҫ“йҮҮз”ЁйЎ¶еҚҮAGVгҖӮиӢҘдёәеҚёиҲ№д»»еҠЎпјҢAGVеңЁеІёжЎҘдҪңдёҡеҢәиЈ…з®ұ并е°Ҷе…¶иҝҗиҫ“еҲ°е ҶеңәдҪңдёҡеҢәпјҢеҰӮжһңARMGе°ҡжңӘеүҚжқҘжҸҗз®ұпјҢеҲҷAGVе°ҶйӣҶиЈ…з®ұйЎ¶еҚҮеҲ°ж”Ҝжһ¶еӨ„пјҢиҝҷж ·еҸҜд»ҘеҮҸе°‘AGVзӯүеҫ…еңәжЎҘеүҚжқҘжҸҗз®ұзҡ„ж—¶й—ҙпјӣиӢҘдёәиЈ…иҲ№д»»еҠЎпјҢARMGе°ҶйӣҶиЈ…з®ұжҸҗеҲ°е ҶеңәдҪңдёҡеҢәпјҢеҰӮжһңAGVе°ҡжңӘеҲ°иҫҫе ҶеңәдҪңдёҡеҢәпјҢеҲҷARMGеҸҜд»ҘиҗҪз®ұеҲ°ж”Ҝжһ¶дёҠпјҢз”ұAGVйЎ¶еҚҮеҲ°ж”Ҝжһ¶еӨ„еҸ–з®ұпјҢиҝҷж ·еҸҜд»ҘеҮҸе°‘ARMGзӯүеҫ…AGVеүҚжқҘиЈ…з®ұзҡ„ж—¶й—ҙгҖӮдҪҶйҮҮз”Ёж”Ҝжһ¶дәӨжҺҘзҡ„ж–№ејҸдјҡеўһеҠ AGVйЎ¶еҚҮйӣҶиЈ…з®ұеҲ°ж”Ҝжһ¶еӨ„жҲ–AGVйЎ¶еҚҮеҲ°ж”Ҝжһ¶еӨ„еҸ–йӣҶиЈ…з®ұзҡ„ж—¶й—ҙгҖӮ
з ҒеӨҙж°ҙе№іиҝҗиҫ“йҮҮз”Ёдј з»ҹAGVгҖӮиӢҘдёәеҚёиҲ№д»»еҠЎпјҢAGVеңЁеІёжЎҘдҪңдёҡеҢәиЈ…з®ұ并е°Ҷе…¶иҝҗиҫ“еҲ°е ҶеңәдҪңдёҡеҢәпјҢARMGжҒ°еҘҪжҠөиҫҫжҲ–е·Із»ҸжҠөиҫҫе ҶеңәдҪңдёҡеҢәпјҢжӯӨж—¶ARMGзӣҙжҺҘд»ҺAGVдёҠжҠ“з®ұпјӣиӢҘдёәиЈ…иҲ№д»»еҠЎпјҢARMGе°ҶйӣҶиЈ…з®ұжҸҗеҲ°е ҶеңәдҪңдёҡеҢәпјҢAGVжҒ°еҘҪжҠөиҫҫжҲ–е·Із»ҸеҲ°иҫҫе ҶеңәдҪңдёҡеҢәпјҢжӯӨж—¶ARMGзӣҙжҺҘиҗҪз®ұеҲ°AGVдёҠгҖӮдҪҶеҰӮжһңжү§иЎҢеҚёиҲ№д»»еҠЎж—¶ARMGжңӘиғҪеҸҠж—¶жҠөиҫҫе ҶеңәдҪңдёҡеҢәжҲ–жү§иЎҢиЈ…иҲ№д»»еҠЎж—¶AGVжңӘиғҪеҸҠж—¶жҠөиҫҫе ҶеңәдҪңдёҡеҢәпјҢйҮҮз”Ёдј з»ҹAGVзҡ„ж–№ејҸдјҡеўһеҠ AGVжҲ–ARMGзҡ„зӯүеҫ…ж—¶й—ҙгҖӮ
2иҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙдҪңдёҡи°ғеәҰ
иҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙдҪңдёҡдё»иҰҒеҲҶдёә3дёӘзҺҜиҠӮпјҡеІёжЎҘиЈ…еҚёиҲ№дҪңдёҡгҖҒAGVж°ҙе№іиҝҗиҫ“дҪңдёҡе’ҢARMGиЈ…еҚёз®ұдҪңдёҡгҖӮ3дёӘдҪңдёҡзҺҜиҠӮйғҪеӯҳеңЁи°ғеәҰй—®йўҳгҖӮ
еІёжЎҘи°ғеәҰжҳҜжҢҮеҹәдәҺе·ІзҹҘзҡ„иҲ№иҲ¶жіҠдҪҚи®ЎеҲ’иҝӣиЎҢеІёжЎҘзҡ„еҲҶй…Қи®ЎеҲ’гҖӮз”ұдәҺеІёжЎҘд№Ӣй—ҙжҳҜе…ұеҗҢиҝӣиЎҢиҲ№иҲ¶иЈ…еҚёдҪңдёҡзҡ„пјҢжңҖжҷҡе®Ңе·Ҙзҡ„еІёжЎҘеҶіе®ҡиҲ№иҲ¶зҰ»жёҜзҡ„ж—¶й—ҙпјҢжүҖд»ҘеңЁйҒөеҫӘеҸ‘з®ұйЎәеәҸзӯүзәҰжқҹзҡ„еүҚжҸҗдёӢпјҢжңҖжҷҡе®Ңе·Ҙзҡ„еІёжЎҘи¶Ҡж—©е®ҢжҲҗдҪңдёҡпјҢиҲ№иҲ¶е°ұеҸҜд»Ҙи¶Ҡж—©зҰ»жёҜгҖӮеІёжЎҘдҪңдёҡйңҖиҰҒиҖғиҷ‘еқҮиЎЎжҖ§пјҢеҚіеҗ„дёӘеІёжЎҘзҡ„дҪңдёҡйҮҸеә”е°ҪйҮҸеқҮиЎЎпјҢйҒҝе…ҚеҮәзҺ°жҹҗдәӣеІёжЎҘдҪңдёҡйҮҸиҝҮеӨҡзҡ„жғ…еҶөгҖӮ
AGVж°ҙе№іиҝҗиҫ“и°ғеәҰжҳҜжҢҮж №жҚ®еІёжЎҘиЈ…еҚёд»»еҠЎйЎәеәҸе’ҢARMGиЈ…еҚёд»»еҠЎйЎәеәҸиҝӣиЎҢAGVзҡ„еҲҶй…Қи®ЎеҲ’гҖӮеңЁAGVеҲҶй…Қи®ЎеҲ’дёӯпјҢйЎ¶еҚҮAGVе·ҘиүәйңҖиҰҒиҖғиҷ‘ARMGеҲ°иҫҫе ҶеңәдҪңдёҡеҢәе’ҢAGVеҲ°иҫҫе ҶеңәдҪңдёҡеҢәзҡ„е…ҲеҗҺйЎәеәҸпјҢдј з»ҹAGVе·ҘиүәдёҚйңҖиҰҒиҖғиҷ‘ARMGгҖҒAGVеҲ°иҫҫе ҶеңәдҪңдёҡеҢәзҡ„е…ҲеҗҺйЎәеәҸпјҢAGVе’ҢARMGзӣҙжҺҘиЎ”жҺҘдҪңдёҡгҖӮAGVж°ҙе№іиҝҗиҫ“и°ғеәҰеә”е°ҪйҮҸзј©зҹӯAGVзҡ„жҖ»з§»еҠЁж—¶й—ҙпјҢеҮҸе°‘иғҪжәҗж¶ҲиҖ—гҖӮ
ARMGи°ғеәҰжҳҜжҢҮе°ҶйӣҶиЈ…з®ұиЈ…еҚёд»»еҠЎеҗҲзҗҶең°еҲҶй…Қз»ҷеҗ„дёӘARMGпјҢдҪҝARMGжҖ»зҡ„移еҠЁж—¶й—ҙжңҖе°‘пјҢARMGиғҪжәҗж¶ҲиҖ—жңҖе°‘гҖӮ
3AGVжҢҮжҙҫеҺҹеҲҷ
3.1йҒөеҫӘдҪңдёҡйЎәеәҸдјҳе…ҲеҺҹеҲҷ
AGVжҢүз…§еІёжЎҘдҪңдёҡд»»еҠЎйЎәеәҸжү§иЎҢз®ұд»»еҠЎпјҢеҚіеҰӮжһңеүҚдёҖдёӘз®ұд»»еҠЎе°ҡжңӘе®ҢжҲҗпјҢеҚідҪҝиҙҹиҙЈеҗҺдёҖдёӘз®ұд»»еҠЎзҡ„AGVе·Із»ҸеҲ°иҫҫеІёжЎҘдҪңдёҡеҢәд№ҹд»Қ然йңҖиҰҒзӯүеҫ…гҖӮ
3.2е…ҲеҲ°е…ҲжҢҮжҙҫзӯ–з•Ҙ
еҜ№дәҺжҹҗдёӘиЈ…еҚёиҲ№д»»еҠЎпјҢйҖүжӢ©жңҖе…Ҳе®ҢжҲҗеүҚдёҖдёӘз®ұд»»еҠЎдё”еӣһеҲ°еҲқе§ӢдҪҚзҪ®зҡ„AGVгҖӮеҰӮжһңжҳҜеҚёиҲ№д»»еҠЎпјҢеҲқе§ӢдҪҚзҪ®дёәеІёжЎҘдҪңдёҡеҢәпјӣеҰӮжһңжҳҜиЈ…иҲ№д»»еҠЎпјҢеҲқе§ӢдҪҚзҪ®дёәе ҶеңәдҪңдёҡеҢәгҖӮеҰӮжһңеҗҢж—¶жңүеӨҡдёӘAGVеҲ°иҫҫпјҢйҖүжӢ©зҙҜи®ЎжңҚеҠЎж—¶й—ҙиҫғе°‘зҡ„AGVпјҢд»Ҙе№іиЎЎAGVзҡ„д»»еҠЎйҮҸгҖӮ
3.3 AGVжҳҜеҗҰйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘзӯ–з•Ҙ
еҚёиҲ№д»»еҠЎгҖӮеҰӮжһңAGVж—©дәҺARMGеҲ°иҫҫе ҶеңәдҪңдёҡеҢәпјҢеҲҷйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘпјҢеҚіAGVе°ҶйӣҶиЈ…з®ұйЎ¶еҚҮеҲ°ж”Ҝжһ¶еӨ„пјҢARMGеңЁж”Ҝжһ¶еӨ„жҺҘз®ұпјӣеҰӮжһңARMGж—©дәҺAGVеҲ°иҫҫе ҶеңәдҪңдёҡеҢәпјҢеҲҷдёҚйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘпјҢеҚідј з»ҹAGVж–№ејҸдәӨжҺҘпјҢARMGзӣҙжҺҘд»ҺAGVдёҠеҸ–з®ұгҖӮ
иЈ…иҲ№д»»еҠЎгҖӮеҰӮжһңARMGж—©дәҺAGVеҲ°иҫҫе ҶеңәдҪңдёҡеҢәпјҢеҲҷйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘпјҢеҚійЎ¶еҚҮAGVж–№ејҸдәӨжҺҘпјҢARMGзӣҙжҺҘиҗҪз®ұеҲ°ж”Ҝжһ¶еӨ„пјҢAGVйЎ¶еҚҮеҲ°ж”Ҝжһ¶еӨ„жҸҗз®ұпјӣеҰӮжһңAGVж—©дәҺARMGеҲ°иҫҫе ҶеңәдҪңдёҡеҢәпјҢеҲҷдёҚйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘпјҢARMGзӣҙжҺҘиҗҪз®ұеҲ°AGVдёҠгҖӮ
4д»ҝзңҹиҜ•йӘҢ
еҒҮи®ҫиҲ№иҲ¶й…ҚиҪҪи®ЎеҲ’гҖҒеІёжЎҘи°ғеәҰи®ЎеҲ’йғҪжҳҜе·ІзҹҘзҡ„пјҢе°Ҷз®ұд»»еҠЎеҲҶдёәдёҚеҗҢзҡ„з°Үд»»еҠЎпјҢ1дёӘз°Үд»»еҠЎд»ЈиЎЁ1з»„еұһжҖ§зӣёеҗҢзҡ„з®ұд»»еҠЎгҖӮйҖҡиҝҮMATLABиҪҜ件д»ҝзңҹиҜ•йӘҢз ”з©¶дёҚеҗҢзҡ„еӣ зҙ еҸҳеҢ–еҜ№з ҒеӨҙдҪңдёҡзҡ„еҪұе“ҚпјҢд»ҘеҸҠз ҒеӨҙйҖӮе®ңйҮҮз”Ёе“Әз§ҚиЈ…еҚёе·ҘиүәпјҡдёҚйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘзҡ„дј з»ҹAGVе·Ҙиүәе’ҢйҖҡиҝҮж”Ҝжһ¶дәӨжҺҘзҡ„йЎ¶еҚҮAGVе·ҘиүәгҖӮ3дёӘеҪұе“Қеӣ зҙ еҲҶеҲ«дёәз®ұд»»еҠЎж•°йҮҸгҖҒAGVж•°йҮҸе’ҢARMGж•°йҮҸгҖӮз”ұдәҺиҜҘиҜ•йӘҢзҡ„ж•°жҚ®е…·жңүйҡҸжңәжҖ§пјҢжүҖд»ҘжҜҸз»„иҜ•йӘҢиҝҗиЎҢ5ж¬ЎпјҢеҸ–жҜҸз»„иҜ•йӘҢз»“жһңзҡ„е№іеқҮеҖјжҸҗй«ҳиҜ•йӘҢж•°жҚ®зҡ„еҮҶзЎ®жҖ§е’ҢеҸҜйқ жҖ§гҖӮеңЁиҜ•йӘҢиҝҮзЁӢдёӯAGVйҮҮз”Ёе…ҲеҲ°е…ҲжҢҮжҙҫзӯ–з•ҘгҖӮ
4.1з®ұд»»еҠЎж•°йҮҸеҸҳеҢ–еҪұе“ҚеҲҶжһҗ
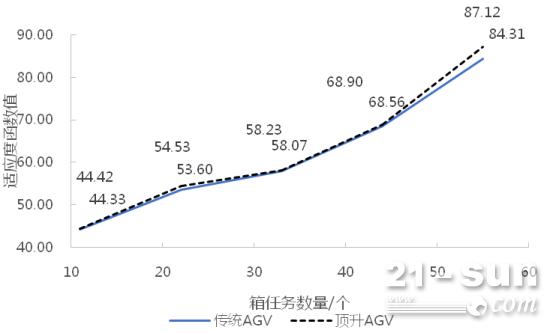
еңЁиҜ•йӘҢиҝҮзЁӢдёӯпјҢеҸӘж”№еҸҳз®ұд»»еҠЎж•°йҮҸпјҢAGVж•°йҮҸдҝқжҢҒдёҚеҸҳдёә8еҸ°пјҢARMGж•°йҮҸдҝқжҢҒдёҚеҸҳдёә8еҸ°пјҢеІёжЎҘж•°йҮҸдҝқжҢҒдёҚеҸҳдёә4еҸ°гҖӮиҜ•йӘҢеҸҜд»Ҙеҫ—еҮәAGVжҖ»зҡ„移еҠЁж—¶й—ҙгҖҒARMGжҖ»зҡ„移еҠЁж—¶й—ҙгҖҒеІёжЎҘжҖ»зҡ„зӯүеҫ…ж—¶й—ҙе’ҢйҖӮеә”еәҰеҮҪж•°еҖјгҖӮдёҚеҗҢз®ұд»»еҠЎж•°йҮҸзҡ„д»ҝзңҹиҜ•йӘҢз»“жһңи§ҒиЎЁ1гҖӮ
иЎЁ1 дёҚеҗҢз®ұд»»еҠЎж•°йҮҸзҡ„д»ҝзңҹиҜ•йӘҢз»“жһң

йҖӮеә”еәҰеҮҪж•°еҖјз»јеҗҲиҖғиҷ‘дәҶAGV移еҠЁж—¶й—ҙгҖҒARMG移еҠЁж—¶й—ҙгҖҒеІёжЎҘзӯүеҫ…ж—¶й—ҙе’ҢеІёжЎҘдҪңдёҡд»»еҠЎзҡ„еқҮиЎЎжҖ§гҖӮдёҚеҗҢз®ұд»»еҠЎж•°йҮҸзҡ„йҖӮеә”еәҰеҮҪж•°еҖји§Ғеӣҫ1гҖӮд»Һеӣҫ1еҸҜд»ҘзңӢеҮәпјҡеҪ“з®ұд»»еҠЎж•°йҮҸе°ҸдәҺ44дёӘж—¶пјҢ2з§Қе·ҘиүәеҜ№еә”зҡ„йҖӮеә”еәҰеҮҪж•°еҖје·®еҲ«дёҚеӨ§пјҢеҚі2з§Қе·Ҙиүәз ҒеӨҙдҪңдёҡж•ҲзҺҮж— жҳҺжҳҫдјҳеҠЈд№ӢеҲҶпјӣеҪ“з®ұд»»еҠЎж•°йҮҸеӨ§дәҺ44дёӘж—¶пјҢдј з»ҹAGVе·ҘиүәиЎЁзҺ°еҮәжӣҙеҘҪзҡ„йҖӮеә”еәҰгҖӮ
еӣҫ1дёҚеҗҢз®ұд»»еҠЎж•°йҮҸзҡ„йҖӮеә”еәҰеҮҪж•°еҖј
4.2AGVж•°йҮҸеҸҳеҢ–еҪұе“ҚеҲҶжһҗ
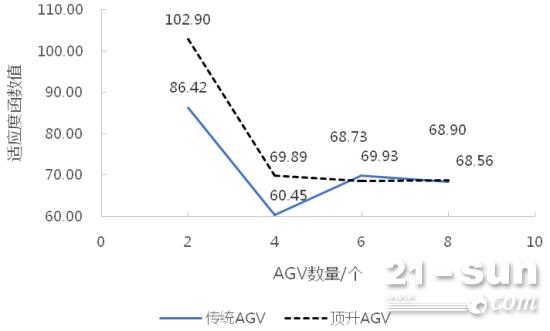
еңЁиҜ•йӘҢиҝҮзЁӢдёӯпјҢеҸӘж”№еҸҳAGVзҡ„ж•°йҮҸпјҢз®ұд»»еҠЎж•°йҮҸдҝқжҢҒдёҚеҸҳдёә44дёӘпјҢARMGж•°йҮҸдҝқжҢҒдёҚеҸҳдёә8еҸ°пјҢеІёжЎҘж•°йҮҸдҝқжҢҒдёҚеҸҳдёә4еҸ°гҖӮдёҚеҗҢAGVж•°йҮҸзҡ„д»ҝзңҹиҜ•йӘҢз»“жһңи§ҒиЎЁ2гҖӮ
иЎЁ2дёҚеҗҢAGVж•°йҮҸзҡ„д»ҝзңҹиҜ•йӘҢз»“жһң
дёҚеҗҢAGVж•°йҮҸзҡ„йҖӮеә”еәҰеҮҪж•°еҖји§Ғеӣҫ2гҖӮд»Һеӣҫ2еҸҜд»ҘзңӢеҮәпјҢеҪ“AGVж•°йҮҸе°ҸдәҺ6еҸ°ж—¶пјҢдј з»ҹAGVе·Ҙиүәзҡ„йҖӮеә”еәҰеҮҪж•°еҖјжҜ”йЎ¶еҚҮAGVе·Ҙиүәзҡ„йҖӮеә”еәҰеҮҪж•°еҖјдҪҺеҫҲеӨҡпјҢйҖӮеә”еәҰеҮҪж•°еҖји¶ҠдҪҺпјҢиЎЁжҳҺз ҒеӨҙж•ҙдҪ“дҪңдёҡжҖ§иғҪжӣҙй«ҳгҖӮеӣ жӯӨпјҢеңЁз®ұд»»еҠЎж•°йҮҸгҖҒARMGж•°йҮҸе’ҢеІёжЎҘж•°йҮҸдёҚеҸҳзҡ„жғ…еҶөдёӢпјҡеҪ“AGVж•°йҮҸе°ҸдәҺ6еҸ°ж—¶пјҢз ҒеӨҙе®ңйҮҮз”Ёдј з»ҹAGVе·ҘиүәпјӣеҪ“AGVж•°йҮҸеӨ§дәҺ6еҸ°ж—¶пјҢз ҒеӨҙе®ңйҮҮз”ЁйЎ¶еҚҮAGVе·ҘиүәгҖӮ
еӣҫ2дёҚеҗҢAGVж•°йҮҸзҡ„йҖӮеә”еәҰеҮҪж•°еҖј
4.3ARMGж•°йҮҸеҸҳеҢ–еҪұе“ҚеҲҶжһҗ
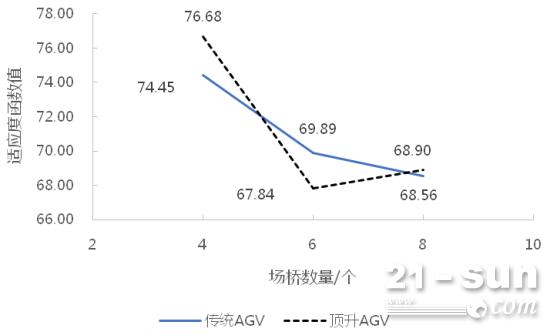
еңЁиҜ•йӘҢиҝҮзЁӢдёӯпјҢеҸӘж”№еҸҳARMGж•°йҮҸпјҢз®ұд»»еҠЎж•°йҮҸдҝқжҢҒдёҚеҸҳдёә44дёӘпјҢAGVж•°йҮҸдҝқжҢҒдёҚеҸҳдёә8еҸ°пјҢеІёжЎҘж•°йҮҸдҝқжҢҒдёҚеҸҳдёә4еҸ°гҖӮдёҚеҗҢARMGж•°йҮҸзҡ„д»ҝзңҹиҜ•йӘҢз»“жһңи§ҒиЎЁ3гҖӮ
иЎЁ3дёҚеҗҢARMGж•°йҮҸзҡ„д»ҝзңҹиҜ•йӘҢз»“жһң

дёҚеҗҢARMGж•°йҮҸзҡ„йҖӮеә”еәҰеҮҪж•°еҖји§Ғеӣҫ3гҖӮд»Һеӣҫ3еҸҜд»ҘзңӢеҮәпјҡеҪ“ARMGж•°йҮҸе°ҸдәҺ5еҸ°ж—¶пјҢдј з»ҹAGVе·ҘиүәиЎЁзҺ°еҮәжӣҙеҘҪзҡ„йҖӮеә”еәҰпјҢз ҒеӨҙе®ңйҮҮз”Ёдј з»ҹAGVе·ҘиүәпјӣеҪ“ARMGж•°йҮҸеӨ§дәҺ5еҸ°дё”е°ҸдәҺ8еҸ°ж—¶пјҢйЎ¶еҚҮAGVе·ҘиүәиЎЁзҺ°еҮәжӣҙеҘҪзҡ„йҖӮеә”еәҰпјҢз ҒеӨҙе®ңйҮҮз”ЁйЎ¶еҚҮAGVе·ҘиүәгҖӮ
еӣҫ3дёҚеҗҢARMGж•°йҮҸзҡ„йҖӮеә”еәҰеҮҪж•°еҖј
4.4д»ҝзңҹиҜ•йӘҢжҖ»з»“
иҜ•йӘҢз»“жһңиЎЁжҳҺпјҡз®ұд»»еҠЎж•°йҮҸзҡ„ж”№еҸҳеҜ№е·Ҙиүәзҡ„йҖүжӢ©еҪұе“ҚдёҚеӨ§пјӣAGVж•°йҮҸе’ҢARMGж•°йҮҸзҡ„еҸҳеҢ–еҜ№е·Ҙиүәзҡ„йҖүжӢ©еҪұе“ҚиҫғеӨ§пјӣAGVж•°йҮҸж”№еҸҳпјҢжҖ»дҪ“иҖҢиЁҖйҮҮз”Ёдј з»ҹAGVе·ҘиүәжӣҙжңүеҲ©дәҺз ҒеӨҙдҪңдёҡпјӣARMGж•°йҮҸдёҚеҗҢпјҢз ҒеӨҙйҖӮе®ңйҮҮз”Ёзҡ„е·Ҙиүәд№ҹдёҚеҗҢгҖӮ

















