



ж‘ҳиҰҒ
й’ҲеҜ№иЈ…еҚёдҪңдёҡзҺҜиҠӮдёӯеӯҳеңЁзҡ„дәәжңәж··жқӮдҪңдёҡе®үе…ЁйҡҗжӮЈе’Ңж•ҲзҺҮеҒҸдҪҺзӯүиЎҢдёҡз—ӣзӮ№пјҢйҮҮз”Ёй«ҳж•ҲжңәеҷЁи§Ҷи§үгҖҒе…Ҳиҝӣдәәе·ҘжҷәиғҪгҖҒеҲҶеёғејҸеӨҡжәҗдҝЎжҒҜиһҚеҗҲзӯүжҷәиғҪж„ҹзҹҘжҠҖжңҜпјҢејҖеұ•йӣҶеҚЎйҳІеҗҠиө·гҖҒжјҸж‘ҳй”Ғеһ«йў„иӯҰгҖҒиҪ®иғҺеҗҠеӨ§иҪҰиЎҢиө°иҮӘеҠЁзә еҒҸдёҺйҳІж’һгҖҒйҫҷй—ЁеҗҠиҮӘеҠЁжҠ“ж”ҫз®ұгҖҒйӣҶеҚЎиҮӘеҠЁеј•еҜјзӯүжҷәиғҪиЈ…еҚёзҡ„е…ій”®зі»з»ҹз ”еҸ‘дёҺеә”з”ЁпјҢеңЁдёҖе®ҡзЁӢеәҰдёҠиөӢиғҪжёҜжңәиЈ…еӨҮпјҢдҪҝжёҜжңәеңЁиЈ…еҚёиҝҮзЁӢдёӯе…·еӨҮжҷәиғҪеҢ–пјҢдёҚдҪҶжҖ§иғҪеӘІзҫҺдәәе·Ҙж“ҚдҪңпјҢиҖҢдё”е®үе…ЁжҖ§й«ҳгҖҒеҸҜйқ жҖ§ејәгҖҒз»ҙжҠӨж–№дҫҝгҖҒжҷәиғҪеҢ–зЁӢеәҰй«ҳгҖҒиғҪж•ҲдёҺзҺҜдҝқдјҳпјҢдҝғиҝӣйӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёе·ҘиүәжЁЎејҸзҡ„иҝӣжӯҘгҖӮ
0 еј•иЁҖ
д»Һж•ҙдёӘйӣҶиЈ…з®ұз ҒеӨҙиЎҢдёҡжқҘзңӢпјҢзӣ®еүҚеӨ§еӨҡж•°йӣҶиЈ…з®ұз ҒеӨҙиҝҳеӨ„дәҺдәәе·Ҙж“ҚдҪңйҳ¶ж®өпјҢдёҖйғЁеҲҶйӣҶиЈ…з®ұз ҒеӨҙе®ҢжҲҗдәҶиҝңзЁӢеҚҠиҮӘеҠЁеҢ–ж”№йҖ пјҢе°‘ж•°з ҒеӨҙе®һзҺ°дәҶиҮӘеҠЁеҢ–ж“ҚдҪңгҖӮдёҚз®ЎжҳҜдј з»ҹйӣҶиЈ…з®ұз ҒеӨҙиҝҳжҳҜеҚҠиҮӘеҠЁеҢ–е’ҢиҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙпјҢе…¶иЈ…еҚёе·ҘиүәжөҒзЁӢдё»иҰҒеҢ…жӢ¬еҚёиҲ№е’ҢиЈ…иҲ№зӯү2дёӘиҝҮзЁӢпјҡ
-
еҚёиҲ№иҝҮзЁӢгҖӮжЎҘеҗҠе°Ҷиҝҗиҫ“иҲ№дёҠзҡ„йӣҶиЈ…з®ұжҠ“иө·ж”ҫзҪ®еҲ°еҶ…иҝҗйӣҶеҚЎжҲ–AGVдёҠпјҢйӣҶиЈ…з®ұиў«иҝҗйҖҒеҲ°жҢҮе®ҡзҡ„е ҶеңәеҗҺпјҢе ҶеңәиҪ®иғҺеҗҠжҲ–иҪЁйҒ“еҗҠе°ҶйӣҶиЈ…з®ұеҗҠж”ҫиҮіжҢҮе®ҡе ҶеңәдҪҚзҪ®пјҢе ҶеңәиҪЁйҒ“еҗҠжҲ–иҪ®иғҺеҗҠеҶҚжҢүз”ҹдә§дҪңдёҡи®ЎеҲ’е°ҶйӣҶиЈ…з®ұж”ҫзҪ®еҲ°еӨ–иҝҗйӣҶеҚЎдёҠпјҲж”ҫз®ұпјүпјҢиҝҗйҖҒз»ҷе®ўжҲ·гҖӮ
-
иЈ…иҲ№иҝҮзЁӢгҖӮе ҶеңәиҪЁйҒ“еҗҠжҲ–иҪ®иғҺеҗҠд»ҺеӨ–иҝҗйӣҶеҚЎдёҠ收з®ұпјҢе°ҶйӣҶиЈ…з®ұеҗҠж”ҫиҮіжҢҮе®ҡе ҶеңәдҪҚзҪ®пјҢеҶҚз”ұе ҶеңәиҪЁйҒ“еҗҠжҲ–иҪ®иғҺеҗҠе°ҶйӣҶиЈ…з®ұж”ҫиҮіеҶ…иҝҗйӣҶеҚЎжҲ–AGVдёҠпјҢиҝҗйҖҒеҲ°иҲ№иҲ¶иЈ…еҚёеҢәпјҢз”ұжЎҘеҗҠе°ҶйӣҶиЈ…з®ұиҝҗйҖҒеҲ°иҝҗиҫ“иҲ№жҢҮе®ҡдҪҚзҪ®гҖӮд»Һй—ёй—ЁгҖҒе ҶеңәеҲ°иҝҗиҫ“иҲ№жһ„жҲҗ1дёӘе®Ңж•ҙзҡ„дҪңдёҡжөҒзЁӢпјҢж— и®әе…¶дёӯе“ӘдёӘзҺҜиҠӮеҮәзҺ°е®үе…ЁжҖ§е’Ңж•ҲзҺҮдҪҺдёӢзҡ„й—®йўҳпјҢйғҪе°ҶеҜ№ж•ҙдёӘйӣҶиЈ…з®ұиҝҗиҫ“жөҒзЁӢзҡ„е®үе…Ёе’Ңж•ҲзҺҮйҖ жҲҗеҪұе“ҚпјҢд»ҺиҖҢйҖ жҲҗиө„жәҗжөӘиҙ№е’Ңз»ҸиҗҘжҲҗжң¬й«ҳдјҒгҖӮйӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёе·ҘиүәжөҒзЁӢи§Ғеӣҫ1гҖӮ

еӣҫ1 йӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёе·ҘиүәжөҒзЁӢ
дј з»ҹйӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёйңҖиҰҒдәәе‘ҳе…ЁзЁӢж“ҚдҪңпјҢйқўдёҙеҠіеҠЁеҠӣжҲҗжң¬дёҚж–ӯж”ҖеҚҮгҖҒеҠіеҠЁеҠӣж—ҘзӣҠзЁҖзјәгҖҒдҪңдёҡе®үе…ЁжҖ§дҪҺгҖҒйӣҶиЈ…з®ұиЈ…еҚёеҸҜи°ғеәҰжҖ§е·®зӯүй—®йўҳпјҢ并иҖғиҷ‘еҲ°з”ҹзҗҶеҺҹеӣ еҜјиҮҙзҡ„еҮәй”ҷзҺҮе’ҢжңҚеҠЎдёҚзЁіе®ҡжҖ§гҖҒзҹҘиҜҶдј жүҝзҡ„дҫқиө–жҖ§пјҢд»ҘеҸҠеҪ“д»ҠзӨҫдјҡеҜ№е®үе…ЁдҪңдёҡзҡ„е…іжіЁеәҰдёҚж–ӯжҸҗй«ҳзӯүпјҢе·ІдёҘйҮҚйҳ»зўҚдәҶз ҒеӨҙзҡ„иҝҗиҗҘгҖӮеҗҢж—¶пјҢзӣ®еүҚиҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙзҡ„иЈ…еҚёе·Ҙиүәе°ҡдёҚе®Ңе–„пјҢиЈ…еҚёе·Ҙиүәд»ҚеӯҳеңЁеҫ…и§ЈеҶізҡ„зҹӯжқҝпјҢйғЁеҲҶжөҒзЁӢйңҖдәәдёәеҸӮдёҺпјҢдҫӢеҰӮпјҡ收з®ұдҪңдёҡж—¶йңҖиҰҒдәәе·ҘзЎ®и®ӨйӣҶеҚЎжҳҜеҗҰиў«еҗҠиө·пјӣиҮӘеҠЁж”ҫз®ұеҮҶзЎ®зҺҮдёҚеҲ°50%пјҢд»ҚйңҖиҰҒдәәе·ҘиҝңзЁӢд»Ӣе…ҘгҖӮз”ұдәҺжёҜеҸЈдёҡеҠЎз№ҒеӨҡпјҢдҪңдёҡзҺҜеўғеӨҚжқӮпјҢдәәе‘ҳеҠіеҠЁејәеәҰеӨ§пјҢеҗ„зҺҜиҠӮдҪңдёҡ“дәәжңәж··жқӮ”пјҢдёҘйҮҚеҪұе“ҚжёҜеҸЈдҪңдёҡж•ҲзҺҮпјҢзЁҚжңүдёҚж…Һе°ұдјҡеҮәзҺ°е®үе…ЁдәӢж•…гҖӮ
дј з»ҹйӣҶиЈ…з®ұз ҒеӨҙеӯҳеңЁиЈ…еҚёдҪңдёҡзҡ„иҮӘеҠЁеҢ–ж°ҙе№ідҪҺгҖҒиө„дә§и®ҫеӨҮе’Ңдәәе‘ҳеҲ©з”ЁзҺҮдҪҺгҖҒдҝЎжҒҜ“еӯӨеІӣ”гҖҒдәәжүҚз»“жһ„жҖ§зҹӯзјәзӯүй—®йўҳпјӣеҚҠиҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёдҪңдёҡжүҖжңүзҺҜиҠӮйғҪйңҖиҰҒдәәе·Ҙе…ЁзЁӢеҸӮдёҺпјӣиҮӘеҠЁеҢ–йӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёдҪңдёҡеҸҲеӨ„дәҺ“йў„и®ҫжү§иЎҢгҖҒеҶізӯ–еҸ—жҺ§”йҳ¶ж®өпјҢжҷәиғҪеҢ–зЁӢеәҰдҪҺпјҢйҒҮеҲ°йқһйў„и®ҫзҡ„зү№ж®Ҡжғ…еҶөпјҢйңҖиҰҒдәәе·Ҙе№Ійў„пјҢеҪұе“ҚиЈ…еҚёдҪңдёҡж•ҙдҪ“ж•ҲзҺҮе’Ңе®үе…ЁжҖ§гҖӮеӣ жӯӨпјҢз»јеҗҲеҲ©з”ЁеӨҡз§ҚжҠҖжңҜжүӢж®өпјҢе°Өе…¶жҳҜдәәе·ҘжҷәиғҪжҠҖжңҜпјҢеңЁжіӣеңЁдҝЎжҒҜе…Ёйқўж„ҹзҹҘе’Ңе№ҝжіӣдә’иҒ”зҡ„еҹәзЎҖдёҠпјҢеҜ№йӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёзҺҜиҠӮеҗ„дҪңдёҡиҰҒзҙ иҝӣиЎҢиөӢиғҪпјҢиғҪжңүж•ҲиЎҘи¶ізӣ®еүҚиЈ…еҚёе·ҘиүәдёӯеӯҳеңЁзҡ„дёҖдәӣзҹӯжқҝпјҢеҲҮе®һеҺӢзј©дәәе·Ҙе№Ійў„жҜ”дҫӢпјҢеҮҸе°‘е®үе…ЁйҡҗжӮЈпјҢжҸҗеҚҮз ҒеӨҙиЈ…еҚёдҪңдёҡзҡ„еҸҜйқ еәҰгҖҒж•ҲзҺҮгҖҒе®үе…ЁжҖ§е’ҢжҷәиғҪеҢ–ж°ҙе№ігҖӮ
1жҷәиғҪж„ҹзҹҘжҠҖжңҜдёҺйӣҶиЈ…з®ұз ҒеӨҙзҡ„ж·ұеәҰиһҚеҗҲ
еҪ“еүҚд»ҘејәеҢ–еӯҰд№ гҖҒж·ұеәҰеӯҰд№ гҖҒе®ҪеәҰеӯҰд№ зӯүдёәд»ЈиЎЁзҡ„дәәе·ҘжҷәиғҪжҠҖжңҜжӯЈиҝ…зҢӣеҸ‘еұ•пјҢеңЁи§ЈеҶіеӨ§ж•°жҚ®й©ұеҠЁзҹҘиҜҶеӯҰд№ гҖҒи·ЁеӘ’дҪ“еҚҸеҗҢеӨ„зҗҶгҖҒдәәжңәзү©еҚҸеҗҢеўһејәжҷәиғҪгҖҒзҫӨдҪ“йӣҶжҲҗжҷәиғҪгҖҒиҮӘдё»жҷәиғҪзі»з»ҹзӯүйўҶеҹҹе…ій”®жҠҖжңҜй—®йўҳдёӯеҸ‘жҢҘдәҶе…ій”®жҖ§зҡ„дҪңз”ЁгҖӮеҗҢж—¶пјҢзұ»и„‘жҷәиғҪзҡ„з ”з©¶дёҺејҖеҸ‘е·ҘдҪңд№ҹеҗҢж ·еҸ—еҲ°еӣҪеҶ…еӨ–зӣёе…із ”究жңәжһ„е’ҢеӯҰиҖ…зҡ„й«ҳеәҰе…іжіЁеҸҠйҮҚи§ҶпјҢдёәдәәе·ҘжҷәиғҪзҡ„ж·ұе…Ҙеҝ«йҖҹеҸ‘еұ•иҝҺжқҘдәҶжңәйҒҮе’ҢжҢ‘жҲҳгҖӮдёҖиҲ¬жқҘиҜҙпјҢдёҖдёӘжңүж•Ҳзҡ„дәәе·ҘжҷәиғҪзі»з»ҹеҹәдәҺе…¶ж„ҹзҹҘгҖҒи®°еҝҶе’ҢжҖқз»ҙиғҪеҠӣпјҢд»ҘеҸҠеӯҰд№ гҖҒиҮӘйҖӮеә”еҸҠиҮӘдё»зҡ„иЎҢдёәиғҪеҠӣзӯүпјҢеҪ“еүҚдәәе·ҘжҷәиғҪеҸ‘еұ•еӨ„дәҺж„ҹзҹҘжҷәиғҪйҳ¶ж®өпјҢеңЁз®—жі•гҖҒз®—еҠӣпјҲи®Ўз®—иғҪеҠӣпјүе’Ңз®—ж–ҷпјҲж•°жҚ®пјүзӯү“дёүз®—”ж–№йқўеҸ–еҫ—йҮҚиҰҒзӘҒз ҙпјҢжӯЈеӨ„дәҺд»Һ“дёҚиғҪз”Ё”еҲ°“еҸҜд»Ҙз”Ё”зҡ„жҠҖжңҜжӢҗзӮ№йҳ¶ж®өгҖӮ
зӣ®еүҚпјҢд»Ҙдәәе·ҘжҷәиғҪе’ҢжңәеҷЁи§Ҷи§үдёәеҹәзЎҖзҡ„жҷәиғҪж„ҹзҹҘжҠҖжңҜпјҢйҖҡиҝҮеҗ„з§Қдј ж„ҹеҷЁиҺ·еҸ–еӨ–йғЁдҝЎжҒҜпјҢеҶҚиҝӣиЎҢи®°еҝҶгҖҒеӯҰд№ гҖҒеҲӨж–ӯгҖҒжҺЁзҗҶзӯүе°Ҷи·Ёж—¶з©әзҡ„еҗҢзұ»е’ҢејӮзұ»дј ж„ҹдҝЎжҒҜиҝӣиЎҢжұҮйӣҶе’ҢиһҚеҗҲпјҢе®һзҺ°и®ӨзҹҘзҺҜеўғе’ҢеҜ№иұЎзұ»еҲ«дёҺеұһжҖ§гҖӮжҷәиғҪж„ҹзҹҘжҠҖжңҜе·Із»ҸејҖе§ӢйҖҗжӯҘеә”з”ЁдәҺжёҜеҸЈиЎҢдёҡпјҢеӣҪеҶ…еӨ–еӨҡ家еӨ§еһӢжёҜеҸЈйӣҶеӣўжӯЈеңЁејҖеұ•еӨҡйЎ№дәәе·ҘжҷәиғҪеҲӣж–°пјҢеҢ…жӢ¬е…Ёж–°з¬¬дәҢд»Јдәәе·ҘжҷәиғҪй—ёеҸЈгҖҒдәәе·ҘжҷәиғҪеңәжЎҘеә”з”Ёе’Ңз ҒеӨҙдҪңдёҡй“ҫжқЎдёҠж¶үеҸҠе…¶д»–иҠӮзӮ№зҡ„дәәе·ҘжҷәиғҪеӯҗзі»з»ҹзҡ„ејҖеҸ‘и®ҫи®ЎгҖӮеңЁејӮжһ„дҪңдёҡдҪ“ж··жқӮзҡ„еӨҚжқӮз ҒеӨҙеңәжҷҜдёӯпјҢе®һзҺ°и®ҫеӨҮеұӮгҖҒж„ҹзҹҘеұӮгҖҒйҖҡдҝЎеұӮгҖҒи®Ўз®—е’ҢжҺ§еҲ¶еұӮеңЁеҚ•е…ғзә§е’Ңеӯҗзі»з»ҹзә§дёҠзҡ„й«ҳж•ҲеҚҸеҗҢйӣҶжҲҗпјӣеҜ№з ҒеӨҙж—¶з©әеҠЁжҖҒдҪңдёҡж•°жҚ®иҝӣиЎҢжҷәиғҪе…іиҒ”гҖҒеҲҶжһҗгҖҒзӣ‘жөӢгҖҒжҺЁзҗҶе’ҢеҶізӯ–пјҢе®һзҺ°д»Һдё»еҠЁж„ҹзҹҘж•°жҚ®еұӮеҲ°жҷәиғҪз»јеҗҲеҶізӯ–еұӮзҡ„д»»еҠЎдәӨдә’пјӣе®һзҺ°и®ҫеӨҮ硬件гҖҒз®—жі•иҪҜ件дёҺж•°жҚ®зҹҘиҜҶзҡ„жңүж•ҲиһҚеҗҲпјҢд»Ҙж»Ўи¶ійӣҶиЈ…з®ұз ҒеӨҙжҷәиғҪеҢ–иЈ…еҚёдҪңдёҡиҰҒжұӮгҖӮйӣҶиЈ…з®ұз ҒеӨҙжҷәиғҪиЈ…еҚёзі»з»ҹеҠҹиғҪжһ¶жһ„еӣҫи§Ғеӣҫ2гҖӮ

еӣҫ2 йӣҶиЈ…з®ұз ҒеӨҙжҷәиғҪиЈ…еҚёзі»з»ҹеҠҹиғҪжһ¶жһ„еӣҫ
2жҷәиғҪж„ҹзҹҘжҠҖжңҜеңЁжҷәиғҪиЈ…еҚёдёӯзҡ„еә”з”Ё
иҒҡз„ҰйӣҶиЈ…з®ұз ҒеӨҙжҷәиғҪиЈ…еҚёе»әи®ҫпјҢйҮҮз”Ёй«ҳж•ҲжңәеҷЁи§Ҷи§үгҖҒе…Ҳиҝӣдәәе·ҘжҷәиғҪгҖҒеҲҶеёғејҸеӨҡжәҗдҝЎжҒҜиһҚеҗҲзӯүжҷәиғҪж„ҹзҹҘжҠҖжңҜпјҢејҖеұ•йӣҶеҚЎйҳІеҗҠиө·гҖҒжјҸж‘ҳй”Ғеһ«йў„иӯҰгҖҒиҪ®иғҺеҗҠеӨ§иҪҰиЎҢиө°иҮӘеҠЁзә еҒҸдёҺйҳІж’һгҖҒйҫҷй—ЁеҗҠиҮӘеҠЁжҠ“ж”ҫз®ұгҖҒйӣҶеҚЎиҮӘеҠЁеј•еҜјзӯүжҷәиғҪиЈ…еҚёзҡ„е…ій”®зі»з»ҹз ”еҸ‘дёҺеә”з”ЁгҖӮ
2.1жңәеҷЁи§Ҷи§үйӣҶеҚЎйҳІеҗҠиө·жҠҖжңҜ
еңЁйҫҷй—ЁеҗҠеҗҠиө·еӨ–иҝҗйӣҶеҚЎиҪҰжһ¶дёҠзҡ„йӣҶиЈ…з®ұиҝӣиЎҢ收з®ұдҪңдёҡж—¶пјҢж—¶еёёдјҡеҸ‘з”ҹеҗҠйӣҶеҚЎдәӢж•…пјҢдәӢж•…дә§з”ҹзҡ„еҺҹеӣ дё»иҰҒжңүд»ҘдёӢ2з§Қжғ…еҶөпјҡдёҖжҳҜйӣҶеҚЎеҸёжңәжңӘе®Ңе…Ёи§ЈејҖдёҺйӣҶиЈ…з®ұиҝһжҺҘзҡ„йӣҶеҚЎиҪҰжһ¶й”Ғй”ҖпјӣдәҢжҳҜеңЁеҗҠе…·жҠ“з®ұж—¶пјҢйӣҶеҚЎеҸ—еҗҠе…·еӨ–еҠӣдҪңз”ЁпјҢйӣҶеҚЎжңүж—¶дјҡжңүдёҖе®ҡзЁӢеәҰзҡ„移еҠЁпјҢеҜјиҮҙйӣҶеҚЎй”Ғй”ҖдёҺйӣҶиЈ…з®ұеӯ”д№Ӣй—ҙдә§з”ҹжҢӮиҒ”гҖӮдёҘйҮҚж—¶пјҢеҗҠйӣҶеҚЎдәӢж•…дјҡеҜјиҮҙдәәе‘ҳдјӨдәЎе’ҢиҪҰиҫҶжҚҹеӨұгҖӮзӣ®еүҚз ҒеӨҙдё»иҰҒйқ дәәе·ҘзЎ®и®ӨпјҢдҪҶи§Ҷи§үз–ІеҠігҖҒиҝңзЁӢзЎ®и®Өзӣёжңәи§Ҷи§’дёҚеӨҹеҘҪгҖҒзЎ®и®Өж—¶йӣҶеҚЎеҗҠиө·й«ҳеәҰдҪҺзӯүеҺҹеӣ йғҪдјҡеҜјиҮҙдәәе·ҘеҲӨж–ӯеӨұиҜҜпјҢжңүдәӣз ҒеӨҙеј•е…ҘдәҶжҝҖе…үйҳІеҗҠиө·зі»з»ҹпјҢдҪҶеҮҶзЎ®зҺҮгҖҒиҷҡжҠҘзҺҮе’ҢжҲҗжң¬е°ҡдёҚеӨҹе®ҢзҫҺгҖӮ
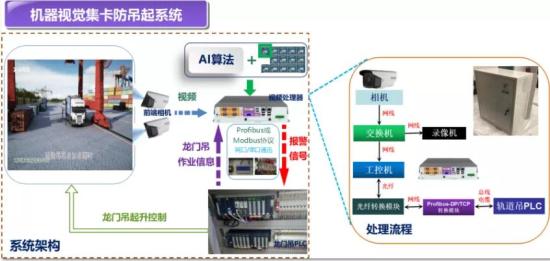
з ”еҲ¶зҡ„зі»з»ҹеҹәдәҺжңәеҷЁи§Ҷи§үе®һзҺ°йӣҶеҚЎеҚёз®ұж—¶зҡ„е…ЁеӨ©ж—¶/е…ЁеӨ©еҖҷе®үе…ЁдҝқжҠӨпјҢйҖҡиҝҮдјҳеҢ–зӣёжңәеёғеұҖеҜ№йӣҶеҚЎиҝӣиЎҢе…Ёж–№дҪҚи§ӮжөӢиҰҶзӣ–пјҢе°ҶеүҚз«ҜзӣёжңәйҮҮйӣҶеҲ°зҡ„дҪңдёҡи§Ҷйў‘йҖҡиҝҮPoEзҪ‘зәҝиҫ“е…Ҙз»ҷе·ҘжҺ§жңәпјҢе·ҘжҺ§жңәеҜ№дҪңдёҡи§Ҷйў‘еӣҫеғҸиҝӣиЎҢеӨ„зҗҶе’ҢеҲҶжһҗпјҢйҖҡиҝҮдәәе·ҘжҷәиғҪжҠҖжңҜжЈҖжөӢеңЁиҫ“е…Ҙзҡ„и§Ҷйў‘еӣҫеғҸдёӯжҳҜеҗҰеӯҳеңЁйӣҶеҚЎпјҢиӢҘеӯҳеңЁйӣҶеҚЎпјҢеҜ№йӣҶеҚЎиҪҰжһ¶иҝӣиЎҢйқўеҗ‘йқһеҲҡжҖ§зӣ®ж Үзҡ„еғҸзҙ зә§иҜӯд№үеҲҶеүІпјҢжүҫеҮәйӣҶеҚЎиҪҰжһ¶еҢәеҹҹпјҢж №жҚ®йӣҶеҚЎиў«еҗҠиө·ж—¶иҪҰжһ¶зү№еҫҒзҡ„ејӮеёёеҸҳеҢ–иҝӣиЎҢиҮӘеҠЁиҜҶеҲ«пјҢеҲӨж–ӯжҳҜеҗҰеҸ‘з”ҹдҪңдёҡйӣҶеҚЎиў«еҗҠиө·зҡ„жғ…еҶөпјҢиӢҘйӣҶеҚЎиҝһеҗҢйӣҶиЈ…з®ұдёҖеҗҢиў«еҗҠиө·пјҢз«ӢеҚіиҫ“еҮәжҠҘиӯҰдҝЎеҸ·пјҢжҠҘиӯҰдҝЎеҸ·йҖҡиҝҮProfibus-DPжҲ–ModbusйҖҡдҝЎжЁЎејҸеҸҚйҰҲз»ҷйҫҷй—ЁеҗҠPLCпјҢйҫҷй—ЁеҗҠPLCз»“еҗҲеҗҠе…·иө·еҚҮзҡ„ж—¶й—ҙеҠЁжҖҒдјҳеҢ–жҺ§еҲ¶зӯ–з•ҘжҺ§еҲ¶еҗҠе…·иө·еҚҮпјҢе®һзҺ°еҜ№жүҖжңүйӣҶеҚЎзұ»еһӢгҖҒжүҖжңүйӣҶиЈ…з®ұеһӢгҖҒжүҖжңүжңӘи§Јй”ҒжЁЎејҸзҡ„е®үе…ЁдҝқжҠӨгҖӮиҜҘзі»з»ҹзӘҒз ҙеӨ§еј№жҖ§жқЎд»¶дёӢйӣҶеҚЎзұ»еһӢе’ҢеҗҠиө·жЁЎејҸеӨҡж ·жҖ§иҜҶеҲ«зҡ„ж ·жң¬е®ҢеӨҮжҖ§зӯүеә”з”Ёе…ій”®жҠҖжңҜпјҢжҲҗеҠҹи§ЈеҶідәҶй•ҝжңҹеӣ°жү°з ҒеӨҙиЎҢдёҡзҡ„йӣҶеҚЎеҚёз®ұе…ЁеӨ©ж—¶/е…ЁеӨ©еҖҷе®үе…ЁдҝқжҠӨйҡҫйўҳпјҢжҳҫи‘—жҸҗй«ҳз ҒеӨҙдҪңдёҡж•ҲзҺҮе’Ңе®үе…ЁжҖ§гҖӮ
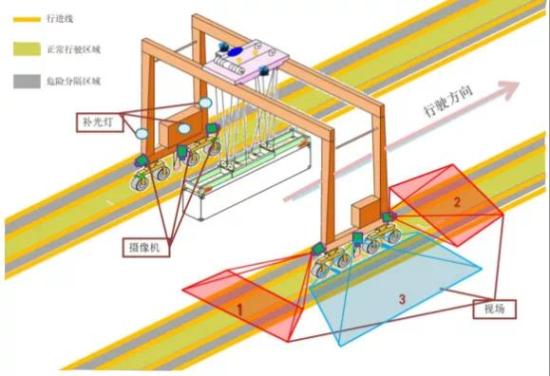
е…·дҪ“еҲ°дј з»ҹе ҶеңәпјҢ2дёӘеүҚз«Ҝзӣёжңәе®үиЈ…еңЁиҪ®иғҺеҗҠжҲ–иҪЁйҒ“еҗҠдёӢйғЁеҢәеҹҹпјӣе…·дҪ“еҲ°иҮӘеҠЁеҢ–е ҶеңәпјҢ4дёӘеүҚз«ҜзӣёжңәеҲҶеҲ«е®үиЈ…еңЁжҜҸдёӘиҪҰйҒ“зҡ„дёӨдҫ§пјҲжҜҸдҫ§2дёӘзӣёжңәпјүгҖӮжң¬зі»з»ҹе®һзҺ°е№іжқҝејҸгҖҒйӘЁжһ¶ејҸзӯүжүҖжңүжүҳжһ¶зұ»еһӢйӣҶеҚЎеҜ№жүҖжңүз®ұеһӢжүҖжңүжңӘи§Јй”ҒжЁЎејҸзҡ„е…ЁеӨ©ж—¶/е…ЁеӨ©еҖҷе®үе…Ёйў„иӯҰгҖӮж №жҚ®еӨ§йҮҸж•°жҚ®з»ҹи®ЎпјҢйӣҶеҚЎйҳІеҗҠиө·зі»з»ҹзҡ„жјҸжҠҘзҺҮпјҲйӣҶеҚЎиў«еҗҠиө·зі»з»ҹжңӘжҠҘиӯҰзҡ„жҰӮзҺҮпјүдёә0гҖҒиҷҡжҠҘзҺҮпјҲйӣҶеҚЎжңӘиў«еҗҠиө·зі»з»ҹиҜҜжҠҘиӯҰзҡ„жҰӮзҺҮпјүдјҳдәҺ0.04%гҖҒйӣҶеҚЎиҪҰжһ¶иў«еҗҠиө·дҝқжҠӨй«ҳеәҰдјҳдәҺ300 mmгҖҒзі»з»ҹе“Қеә”ж—¶й—ҙе°ҸдәҺ0.3 sпјҢйҖӮеә”зҷҪеӨ©гҖҒеӨңжҷҡгҖҒйӣЁеӨ©гҖҒйӣҫеӨ©гҖҒйӣӘеӨ©зӯүдҪңдёҡзҺҜеўғпјҢеҗҢж—¶е…·жңүиҮӘжЈҖеҠҹиғҪпјҢзі»з»ҹж•…йҡңж—¶иҮӘеҠЁеҸ‘еҮәжҠҘиӯҰдҝЎжҒҜпјҢ并еҸҜи§Ҷйў‘еӣһжәҜдҪңдёҡдәӢж•…пјҢжҸҗдҫӣдёҖеҘ—е®үе…ЁгҖҒеҸҜйқ зҡ„дҪҺжҲҗжң¬йӣҶеҚЎйҳІеҗҠиө·дҝқжҠӨж–№жЎҲгҖӮжңәеҷЁи§Ҷи§үйӣҶеҚЎйҳІеҗҠиө·зі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫи§Ғеӣҫ3гҖӮ
пјҲaпјүзі»з»ҹжһ¶жһ„еӣҫ

пјҲbпјүзҺ°еңәеӣҫ
еӣҫ3 жңәеҷЁи§Ҷи§үйӣҶеҚЎйҳІеҗҠиө·зі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫ
2.2жјҸж‘ҳй”Ғеһ«жҷәиғҪйў„иӯҰжҠҖжңҜ
еҚёиҲ№дҪңдёҡж—¶пјҢзҺ°еңәдәәе‘ҳеҒ¶е°”дјҡжјҸж‘ҳд»Һиҝҗиҫ“иҲ№дёҠеҚёдёӢзҡ„йӣҶиЈ…з®ұеә•и§’й”Ғеһ«пјҢе°Өе…¶жҳҜеёҰжңүиҮӘй”Ғзҡ„еӨ§/дёӯй”Ғеһ«пјҢйӣҶиЈ…з®ұж”ҫиҮіе Ҷеңәж—¶дјҡдёҺдёӢеұӮйӣҶиЈ…з®ұдә§з”ҹеӣәиҒ”пјҢеҶҚж¬ЎжҸҗз®ұж—¶е°ҶеҜјиҮҙдёҘйҮҚзҡ„еҗҠз®ұдәӢж•…гҖӮеҪ“еүҚдё»иҰҒдҫқиө–йҫҷй—ЁеҗҠжҲ–жЎҘеҗҠж“ҚдҪңдәәе‘ҳдәәзңји§ӮеҜҹпјҢй•ҝж—¶й—ҙдҪңдёҡз–ІеҠіж—¶еҫҲе®№жҳ“жјҸеҲӨгҖӮ
зі»з»ҹеҹәдәҺжңәеҷЁи§Ҷи§үжҠҖжңҜе’Ңж·ұеәҰеӯҰд№ ж–№жі•е®һзҺ°йӣҶиЈ…з®ұеә•и§’жјҸж‘ҳй”Ғеһ«е…Ёз»ҙеәҰжЈҖжөӢе’Ңйў„иӯҰзі»з»ҹпјҢйҖҡиҝҮдјҳеҢ–и®ҫи®Ўи§Ҷйў‘зӣ‘жөӢзі»з»ҹеёғеұҖеҜ№й”Ғеһ«еҢәеҹҹиҝӣиЎҢе…Ёж–№дҪҚеӨҡи§’еәҰе®һж—¶и§ӮжөӢпјҢйҮҮз”ЁеӨҡи·Ҝи§Ҷйў‘еҜ№еҚ•дёҖйҫҷй—ЁеҗҠзҡ„еӨҡеҜ№дёҖдјҳеҢ–жҺ§еҲ¶зӯ–з•ҘпјҢдҪҝеӨҡи·Ҝи§Ҷйў‘иҫ“е…ҘдҝЎеҸ·дёҺеӨҡи·Ҝи§Ҷйў‘иҫ“еҮәдҝЎеҸ·д№Ӣй—ҙж»Ўи¶іиҮӘз”ұеҜ№еә”еҠҹиғҪпјҢз»“еҗҲж•°жҚ®еўһе№ҝе’ҢеӨҡе°әеәҰеҚ·з§ҜзҘһз»ҸзҪ‘з»ңе°Ҹзӣ®ж ҮжЈҖжөӢжҠҖжңҜеңЁзӣ®ж Үз§Қзұ»з№ҒжқӮгҖҒйҳҙеҪұгҖҒе…үз…§зӯүдёҚеҲ©жқЎд»¶дёӢе®ҢжҲҗй”Ғеһ«зӣ®ж ҮжЈҖжөӢпјҢиӢҘжЈҖжөӢеҲ°й”Ғеһ«пјҢз«ӢеҚіиҫ“еҮәжҠҘиӯҰдҝЎеҸ·пјҢжҠҘиӯҰдҝЎеҸ·йҖҡиҝҮProfibus-DPжҲ–ModbusйҖҡдҝЎжЁЎејҸеҸҚйҰҲз»ҷйҫҷй—ЁеҗҠжҲ–жЎҘеҗҠPLCпјҢеҒңжӯўйҫҷй—ЁеҗҠжҲ–жЎҘеҗҠзҡ„еҗҠе…·иө·еҚҮпјҢйҖҡзҹҘдҪңдёҡдәәе‘ҳж‘ҳйҷӨйҒ—з•ҷзҡ„й”Ғеһ«пјҢи®ҫи®ЎеӨҡзә§еә”жҖҘеӨ„зҪ®жңәеҲ¶пјҢеңЁдҝқйҡңиЈ…еҚёдёҡеҠЎдёҖиҮҙжҖ§зҡ„жғ…еҶөдёӢпјҢе®һзҺ°й”Ғеһ«йӣ¶иҝӣеңәзӣ®ж ҮгҖӮ
е…·дҪ“еҲ°дј з»ҹе ҶеңәпјҢ6дёӘеүҚз«Ҝзӣёжңәе®үиЈ…еңЁиҪ®иғҺеҗҠжҲ–иҪЁйҒ“еҗҠдёӢйғЁеҢәеҹҹпјӣе…·дҪ“еҲ°иҮӘеҠЁеҢ–е ҶеңәпјҢ10дёӘеүҚз«Ҝе°ҸеҚҠзҗғзӣёжңәеҲҶеҲ«е®үиЈ…еңЁжЎҘеҗҠдёӯиҪ¬е№іеҸ°дёӨдҫ§з«ӢжҹұдёҠпјҲжҜҸдҫ§5дёӘзӣёжңәпјүпјҢе®һзҺ°еҜ№йӣҶиЈ…з®ұеә•и§’жјҸж‘ҳй”Ғеһ«зҡ„еҮҶзЎ®иҜҶеҲ«гҖӮж №жҚ®еӨ§йҮҸж•°жҚ®з»ҹи®ЎпјҢдј з»ҹз ҒеӨҙеӨ§/дёӯй”Ғеһ«жЈҖжөӢзҺҮ100%пјҢе°Ҹй”Ғеһ«пјҲйқһиҮӘй”ҒпјүжЈҖжөӢзҺҮеӨ§дәҺ90%пјҢиҷҡжҠҘзҺҮ0.5%пјӣиҮӘеҠЁеҢ–з ҒеӨҙеӨ§/дёӯй”Ғеһ«жЈҖжөӢзҺҮ100%пјҢе°Ҹй”Ғеһ«пјҲйқһиҮӘй”ҒпјүжЈҖжөӢзҺҮеӨ§дәҺ99%пјҢиҷҡжҠҘзҺҮ0.1%пјӣзі»з»ҹе“Қеә”ж—¶й—ҙе°ҸдәҺ1 sгҖӮжјҸж‘ҳй”Ғеһ«йў„иӯҰзі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫи§Ғеӣҫ4гҖӮ

пјҲaпјүзі»з»ҹжһ¶жһ„еӣҫ

пјҲbпјүзҺ°еңәеӣҫ
еӣҫ4 жјҸж‘ҳй”Ғеһ«йў„иӯҰзі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫ
2.3иҪ®иғҺеҗҠеӨ§иҪҰиЎҢиө°иҮӘеҠЁзә еҒҸе’ҢйҳІж’һжҠҖжңҜ
иҪ®иғҺеҗҠеӨ§иҪҰеңЁиҪ¬еңәдҪңдёҡж—¶пјҢйңҖдёҘж јжҢүйў„е®ҡиҪЁйҒ“иЎҢ驶пјҢз”ұдәҺи·ҜйқўдёҚе№іеҜјиҮҙеӨ§иҪҰйў з°ёгҖҒз”өж°”жҲҝдҫ§иҪ®иғҺзЈЁжҚҹеӨ§гҖҒжңәжў°з»“жһ„ж— жі•з»қеҜ№еҜ№з§°гҖҒдәәе‘ҳиҜҜж“ҚдҪңзӯүй—®йўҳеёёеҸ‘з”ҹеӨ§иҪҰеҒҸзҰ»йў„е®ҡиҪЁйҒ“зҡ„жғ…еҶөгҖӮжӯӨеӨ–пјҢиҪ®иғҺеҗҠеңЁиЎҢ驶дёӯиҝҳдјҡеҮәзҺ°дёҺдәәе‘ҳгҖҒиҝқеҒңиҪҰиҫҶгҖҒеҗҢеңәеҢәе…¶д»–иҪ®иғҺеҗҠзӯүйҡңзўҚзү©зӣёж’һзҡ„дәӢж•…гҖӮзӣ®еүҚпјҢеӨ§иҪҰиЎҢиө°зә еҒҸе’ҢйҳІж’һдё»иҰҒдҫқйқ еҸёжңәзӣ®жөӢеҒҸ移и·қзҰ»е’Ңйў„еҲӨпјҢж №жҚ®дәәе·Ҙз»ҸйӘҢйҮҮеҸ–зӣёеә”зӯ–з•ҘиҝӣиЎҢзә еҒҸе’ҢйҳІж’һпјҢеҸёжңәйңҖиҰҒж—¶еҲ»йӣҶдёӯзІҫеҠӣпјҢжһҒжҳ“з–ІеҠіпјҢеӯҳеңЁеҒҸзҰ»йў„е®ҡиҪЁйҒ“еҗҺж’һиҪҰгҖҒж’һз®ұзҡ„йЈҺйҷ©гҖӮ
зі»з»ҹж №жҚ®иҪ®иғҺеҗҠиЎҢ驶еҠЁеҠӣеӯҰжЁЎеһӢз»ҷеҮәйҫҷй—ЁеҗҠиҝҗеҠЁиҪЁиҝ№и¶…и¶Ҡз§ҜеҲҶж•°еӯҰи§ЈжһҗиЎЁиҫҫпјҢеҲ©з”Ёе®үиЈ…еңЁеӨ§иҪҰеүҚеҗҺж–№е’ҢдёӨдҫ§зҡ„зӣёжңәе®һж—¶иҺ·еҸ–еӨ§иҪҰиЎҢиҝӣеүҚж–№зҡ„еј•еҜјзәҝпјҢз»“еҗҲжңәеҷЁи§Ҷи§үеј•еҜјзәҝйІҒжЈ’жЈҖжөӢгҖҒиҜҶеҲ«дёҺи·ҹиёӘжҠҖжңҜдј°и®ЎеӨ§иҪҰе®һйҷ…иЎҢ驶и·ҜзәҝдёҺйў„е®ҡи·Ҝзәҝзҡ„еҒҸе·®пјҢеңЁжӯӨеҹәзЎҖдёҠз»“еҗҲи·қзҰ»еҒҸе·®дёҺж–№еҗ‘еҒҸе·®пјҢйҮҮз”Ёзә еҒҸжҺ§еҲ¶жЁЎеһӢе’Ңи·Ҝеҫ„жңҖдјҳжҺ§еҲ¶ж–№жі•жҺ§еҲ¶иҪ®иғҺеҗҠеүҚеҗҺеӨ§иҪҰзҡ„й©ұеҠЁз”өжңәпјҢиҮӘеҠЁзә жӯЈеӨ§иҪҰиЎҢ驶方еҗ‘е’ҢйҖҹеәҰпјҢи§ЈеҶіеӨ§е»¶ж—¶дҝЎжҒҜиЎҘеҒҝе’ҢеӨ§иҪҰиӣҮеҪўиЎҢиө°зӯүйҡҫйўҳпјҢй«ҳйҖҹиЎҢ驶иҮӘеҠЁзә еҒҸиЎҢиҪҰзІҫеәҰе’ҢиҪҰдҪ“жҷғеҠЁеқҮдјҳдәҺзҶҹз»ғдәәе·Ҙж“ҚдҪңпјҢе®һзҺ°е·ҘзЁӢеҸҜз”Ёзҡ„еҹәдәҺжңәеҷЁи§Ҷи§үзҡ„иҪ®иғҺеҗҠе…ЁйҖҹе…ЁеӨ©ж—¶иҮӘеҠЁзә еҒҸзі»з»ҹгҖӮеҗҢж—¶пјҢйҮҮз”ЁеҹәдәҺзІ—зІ’еәҰзҡ„еңЁзәҝеҠЁжҖҒеҸҜйҮҚжһ„ж·ұеәҰеӯҰд№ жҷәиғҪи§Ҷйў‘еҲҶжһҗж–№жі•еҜ№йҫҷй—ЁеҗҠиЎҢиҝӣи·ҜзәҝдёҠзҡ„дәәгҖҒиҪҰзӯүеӨҡзұ»еӨ§з•ёеҸҳзӣ®ж ҮиҝӣиЎҢиҜҶеҲ«пјҢе®һж—¶иҜҶеҲ«е№¶еҲӨж–ӯиЎҢиҝӣж–№еҗ‘дёҠжҳҜеҗҰеӯҳеңЁдәәе‘ҳжҲ–йҡңзўҚзү©пјҢз»“еҗҲиҝҗеҠЁзӣ®ж ҮиҪЁиҝ№еҠЁжҖҒйў„жөӢжЁЎеһӢпјҢиҫ“еҮәзӣёе…ідҝЎжҒҜз»ҷPLCзі»з»ҹпјҢжҺ§еҲ¶еӨ§иҪҰиҮӘеҠЁеҮҸйҖҹе’ҢеҒңиҪҰе®һзҺ°иҪ®иғҺеҗҠйҳІж’һпјҢзЎ®дҝқиҪ®иғҺеҗҠиғҪиҮӘеҠЁе№ізЁіиЎҢиө°гҖӮз»ҸжөӢиҜ•пјҢиҪ®иғҺеҗҠеӨ§иҪҰиЎҢиө°иҮӘеҠЁзә еҒҸзІҫеәҰдјҳдәҺ±10 cmпјҢйҳІж’һеҮҶзЎ®зҺҮеӨ§дәҺ99%пјҢзі»з»ҹе“Қеә”ж—¶й—ҙе°ҸдәҺ0.1 sгҖӮиҪ®иғҺеҗҠеӨ§иҪҰиЎҢиө°иҮӘеҠЁзә еҒҸе’ҢйҳІж’һзі»з»ҹжЎҶеӣҫеҸҠзҺ°еңәеӣҫи§Ғеӣҫ5гҖӮ
пјҲaпјүзі»з»ҹжЎҶеӣҫ

пјҲbпјүзҺ°еңәеӣҫ
еӣҫ5 иҪ®иғҺеҗҠеӨ§иҪҰиЎҢиө°иҮӘеҠЁзә еҒҸе’ҢйҳІж’һзі»з»ҹжЎҶеӣҫеҸҠзҺ°еңәеӣҫ
2.4йҫҷй—ЁеҗҠиҫ…еҠ©иҮӘеҠЁжҠ“ж”ҫз®ұжҠҖжңҜ
йҫҷй—ЁеҗҠиҮӘеҠЁжҠ“ж”ҫз®ұжҳҜе ҶеңәдҪңдёҡж ёеҝғд»»еҠЎпјҡдј з»ҹз ҒеӨҙзҡ„йҫҷй—ЁеҗҠеҸёжңәж“ҚдҪңеҸёжңәе®ӨжүӢжҹ„жүӢеҠЁжҺ§еҲ¶еҗҠе…·пјҢйҖҡиҝҮдәәзңји§ӮеҜҹиҝӣиЎҢйӣҶиЈ…з®ұеӯ”е’ҢйӣҶеҚЎиҪҰжһ¶й”Ғй”Җзҡ„еҜ№дҪҚдёҺжҠ“ж”ҫпјӣеҚҠиҮӘеҠЁеҢ–з ҒеӨҙеҸёжңәйңҖиҰҒйҖҡиҝҮеҗҠе…·4дёӘи§’зҡ„зӣёжңәи§ӮеҜҹйӣҶиЈ…з®ұеӯ”е’ҢйӣҶеҚЎиҪҰжһ¶й”Ғй”ҖдҪҚзҪ®еҶҚиҝӣиЎҢиҝңзЁӢж“ҚдҪңпјӣиҮӘеҠЁеҢ–з ҒеӨҙйҮҮз”ЁжҝҖе…үжү«жҸҸж–№ејҸиҮӘеҠЁзЎ®е®ҡйӣҶиЈ…з®ұеӯ”е’ҢйӣҶеҚЎиҪҰжһ¶й”Ғй”ҖдҪҚзҪ®пјҢдҪҶиҮӘеҠЁж”ҫз®ұзҡ„еҮҶзЎ®зҺҮд№ҹдёҚеҲ°50%гҖӮжҠ“ж”ҫз®ұдҪңдёҡж—¶йңҖиҰҒж“ҚдҪңеҗҠе…·иҝӣиЎҢеҸҚеӨҚеҜ№дҪҚпјҢеңЁдҪңдёҡз№Ғеҝҷж—¶еҚ з”Ёйҫҷй—ЁеҗҠиө„жәҗе’ҢдҪңдёҡиҪҰйҒ“иө„жәҗпјҢеҪұе“ҚиЈ…еҚёж•ҲзҺҮгҖӮ
зі»з»ҹйҖҡиҝҮе®үиЈ…еңЁеҗҠе…·4дёӘи§’дёҠжҲ–йҫҷй—ЁеҗҠе°ҸиҪҰдёҠзҡ„4дёӘзӣёжңәе®һж—¶иҺ·еҸ–йӣҶиЈ…з®ұеӯ”е’ҢиҪҰжһ¶й”Ғй”Җзҡ„и§Ҷйў‘еӣҫеғҸпјҢйҮҮз”ЁеӨҡе°әеәҰиҙқеҸ¶ж–ҜеҚ·з§ҜзҘһз»ҸзҪ‘з»ңжҠҖжңҜеҜ№йӣҶиЈ…з®ұеӯ”жҲ–иҪҰжһ¶й”Ғй”ҖеӣҫеғҸиҝӣиЎҢиҮӘеҠЁиҜҶеҲ«е’Ңи·ҹиёӘпјҢеҲ©з”ЁеӨҡжәҗдҝЎжҒҜиһҚеҗҲж–№жі•е®һж—¶дј°и®ЎеҗҠе…·дёҺйӣҶиЈ…з®ұеӯ”жҲ–иҪҰжһ¶й”Ғй”Җзҡ„зӣёеҜ№дҪҚзҪ®еҒҸе·®е’Ңе§ҝжҖҒеҒҸе·®пјҢ并е»әз«ӢеҗҠе…·ж—¶з©әеҠЁжҖҒи°ғж•ҙдјҳеҢ–жЁЎеһӢпјҢз»“еҗҲи§Ҷи§үдјәжңҚй—ӯзҺҜжҺ§еҲ¶жҠҖжңҜпјҢдјҳеҢ–жҺЁзҗҶеҗҠе…·жҺ§еҲ¶йҮҸпјҢиҫҫеҲ°еҗҠе…·и°ғж•ҙзҡ„йӣ¶еҒңйЎҝпјҢе®һзҺ°еҹәдәҺжңәеҷЁи§Ҷи§үзҡ„йҫҷй—ЁеҗҠиҮӘеҠЁеҜ№дҪҚжҠҖжңҜпјҢеҮҸе°‘еҸҚеӨҚеҜ№дҪҚиҖ—ж—¶пјҢиҮӘеҠЁдјҳеҢ–еҢ№й…Қйҫҷй—ЁеҗҠиЈ…еҚёд»»еҠЎпјҢеңЁжҠҖжңҜе’ҢжҲҗжң¬ж–№йқўйғҪдјҳдәҺзҺ°жңүзі»з»ҹгҖӮз»ҸжөӢиҜ•пјҢз®ұеӯ”жҲ–й”Ғй”Җзҡ„е®ҡдҪҚзІҫеәҰдјҳдәҺ±3 cmпјҢжҠ“ж”ҫз®ұеҮҶзЎ®зҺҮеӨ§дәҺ90%гҖӮйҫҷй—ЁеҗҠиҮӘеҠЁжҠ“ж”ҫз®ұзі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫи§Ғеӣҫ6гҖӮ

пјҲaпјүзі»з»ҹжһ¶жһ„еӣҫ

пјҲbпјүзҺ°еңәеӣҫ
еӣҫ6 йҫҷй—ЁеҗҠиҮӘеҠЁжҠ“ж”ҫз®ұзі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫ
2.5йӣҶеҚЎиҮӘеҠЁеј•еҜјжҠҖжңҜ
йӣҶеҚЎеҒңиҪҰеҜ№дҪҚжҳҜйӣҶиЈ…з®ұз ҒеӨҙиЈ…еҚёе·Ҙиүәдёӯзҡ„йҮҚиҰҒдёҖзҺҜпјҢйӣҶеҚЎеҸёжңәж— жі•еҲ©з”ЁеҗҠе…·жңӘеҲ°дҪҚеүҚзҡ„ж—¶й—ҙе®ҢжҲҗзІҫзЎ®еҜ№дҪҚеҒңиҪҰпјҢеңЁдёҖе®ҡзЁӢеәҰдёҠйҷҚдҪҺдәҶиЈ…еҚёж•ҲзҺҮгҖӮ
й’ҲеҜ№йӣҶеҚЎеҒңиҪҰдҪҚзҪ®дёҚеҮҶзЎ®еҜјиҮҙзҡ„иЈ…еҚёдҪңдёҡж•ҲзҺҮдҪҺй—®йўҳпјҢзі»з»ҹеҹәдәҺжңәеҷЁи§Ҷи§үзҡ„йӣҶеҚЎе®һж—¶иҮӘеҠЁеј•еҜјзі»з»ҹпјҢйҮҮз”ЁеҹәдәҺйӣҶеҚЎиҪҰеӨҙзҡ„йӣҶиЈ…з®ұз®ұеӯ”жҲ–йӣҶеҚЎиҪҰжһ¶й”Ғй”ҖеӨҡеұӮзә§зӣ®ж ҮжЈҖжөӢдёҺе®ҡдҪҚжҠҖжңҜпјҢеҜ№дҝҜи§ҶйӣҶеҚЎиҪҰеӨҙеӣҫеғҸиҝӣиЎҢиҜҶеҲ«е’Ңе®ҡдҪҚпјҢз»“еҗҲз ҒеӨҙе ҶеңәйӣҶеҚЎдҪңдёҡзү№зӮ№пјҢе°Ҷйҫҷй—ЁеҗҠеҗҠе…·дёӢж–№дҪҚзҪ®жҠҪиұЎеҪўжҲҗеҗ„иҠӮзӮ№еқҗж ҮпјҢж №жҚ®йӣҶиЈ…з®ұз®ұеӯ”жҲ–йӣҶеҚЎиҪҰжһ¶й”Ғй”Җзҡ„иҜҶеҲ«е’Ңе®ҡдҪҚз»“жһңпјҢи®Ўз®—йӣҶиЈ…з®ұжҲ–иҪҰжһ¶дёҺйў„е®ҡзӮ№д№Ӣй—ҙзҡ„еҒҸе·®и§’еәҰе’ҢеҒҸе·®и·қзҰ»пјҢйҖҡиҝҮжҳҫзӨәиЈ…зҪ®е®һж—¶иҫ“еҮәйӣҶеҚЎеҪ“еүҚдҪҚзҪ®дёҺйў„е®ҡдҪҚзҪ®зҡ„еҒҸе·®пјҢиҫ…еҠ©еҸёжңәжӣҙеҝ«еҲ°иҫҫжҢҮе®ҡдҪҚзҪ®гҖӮеңЁзҺ°жңүи®ҫеӨҮеҹәзЎҖдёҠд»ҘиҫғдҪҺжҲҗжң¬е®һзҺ°йӣҶеҚЎиҮӘеҠЁеј•еҜјпјҢй’ҲеҜ№еҗ„зұ»еҶ…иҝҗйӣҶеҚЎе’ҢеӨ–иҝҗйӣҶеҚЎеқҮеҸҜжҸҗй«ҳдҪңдёҡж•ҲзҺҮгҖӮз»ҸжөӢиҜ•пјҢйӣҶеҚЎзҡ„иҮӘеҠЁеј•еҜјеҮҶзЎ®зҺҮеӨ§дәҺ99%гҖӮйӣҶеҚЎиҮӘеҠЁеј•еҜјзі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫи§Ғеӣҫ7гҖӮ

пјҲaпјүзі»з»ҹжһ¶жһ„еӣҫ

пјҲbпјүзҺ°еңәеӣҫ
еӣҫ7 йӣҶеҚЎиҮӘеҠЁеј•еҜјзі»з»ҹжһ¶жһ„еӣҫеҸҠзҺ°еңәеӣҫ

















