



йҡҸзқҖеҗҠиЈ…и®ҫеӨҮзҡ„еӨ§еһӢеҢ–гҖҒйҮҚеһӢеҢ–д»ҘеҸҠеҗҠиЈ…и·қзҰ»зҡ„еўһеҠ пјҢеҗҠиЈ…йҡҫеәҰи¶ҠжқҘи¶ҠеӨ§пјҢеҗҠиЈ…ж–№ејҸжӣҙеҠ еӨҚжқӮгҖӮдёәдәҶиғҪеӨҹйҖӮеә”жӣҙеҠ еӨҚжқӮзҡ„е·ҘдҪңзҺҜеўғгҖҒе®үе…Ёй«ҳж•Ҳең°еҲ¶е®ҡеҗҠиЈ…ж–№жЎҲпјҢеҗ„з§Қдёүз»ҙиҷҡжӢҹеҗҠиЈ…д»ҝзңҹзі»з»ҹеә”иҝҗиҖҢз”ҹпјҢеҰӮеӣҪеҶ…зҡ„дёүз»ҙеҗҠиЈ…д»ҝзңҹзі»з»ҹд»ҘеҸҠеӣҪеӨ–зҡ„3D Lift PlanгҖҒLift Planner д»ҘеҸҠKranXpert зӯүгҖӮ
иҮӮжһ¶жҢ еәҰеҪўеҸҳеҢ…жӢ¬еҸҳе№…е№ійқўеҶ…зҡ„жҢ еәҰе’ҢеӣһиҪ¬е№ійқўеҶ…зҡ„жҢ еәҰпјҢжҳҜиө·йҮҚжңәе°Өе…¶жҳҜеӨ§еҗЁдҪҚз®ұеҪўиҮӮз»“жһ„зҡ„иө·йҮҚжңәеңЁеҗҠиЈ…дҪңдёҡиҝҮзЁӢдёӯйҡҫд»Ҙе…ӢжңҚзҡ„й—®йўҳгҖӮеӣ жӯӨпјҢеңЁеҗҠ装规еҲ’еҸҠд»ҝзңҹзі»з»ҹдёӯиҖғиҷ‘иҮӮжһ¶жҢ еәҰеӣ зҙ зҡ„еҪұе“Қе…·жңүеҚҒеҲҶйҮҚиҰҒзҡ„зҺ°е®һж„Ҹд№үгҖӮ
然иҖҢпјҢзӣ®еүҚзҡ„еҗҠиЈ…д»ҝзңҹзі»з»ҹеқҮе°Ҷиө·йҮҚжңәиҮӮжһ¶дҪңдёәеҲҡдҪ“иҖғиҷ‘пјҢжңӘиҖғиҷ‘жҢ еәҰеҪўеҸҳеҜ№иө·йҮҚжңәеҗҠиЈ…иҝҗеҠЁзҡ„еҪұе“ҚпјҢжӣҙжІЎжңүе°ҶиҮӮжһ¶зҡ„жҢ еәҰеҪўеҸҳйҖҡиҝҮдёүз»ҙжЁЎжӢҹиҝӣиЎҢзӣҙи§Ӯең°еұ•зӨәгҖӮеӣ жӯӨпјҢйҖҡиҝҮиҝҷдәӣд»ҝзңҹзі»з»ҹеҫ—еҲ°зҡ„еҗҠиЈ…иҝҗеҠЁж–№жЎҲеҸҜеҸӮиҖғжҖ§дёҚејәпјҢе®һйҷ…жҢҮеҜјж„Ҹд№үдёҚеӨ§пјҢз”ҡиҮіеҮәзҺ°й”ҷиҜҜжҢҮеҜјзҡ„жғ…еҶөпјҢдёҘйҮҚеҪұе“ҚиҝҷдәӣзҺ°жңүжҠҖжңҜзҡ„е®һз”ЁжҖ§пјҢд»ҘеҸҠеҗҠиЈ…дҪңдёҡзҡ„е®үе…ЁжҖ§гҖӮ
究其еҺҹеӣ пјҢеңЁеҗҠиЈ…д»ҝзңҹйўҶеҹҹе®һзҺ°иҫғеҮҶзЎ®зҡ„иҮӮз«ҜжҢ еәҰе®һж—¶и®Ўз®—йҡҫеәҰиҫғеӨ§гҖӮзӣ®еүҚпјҢе®һзҺ°жҢ еәҰдё»иҰҒжңүдёӨз§Қж–№жі•пјҡ1пјүж №жҚ®з»Ҹе…ёеҠӣеӯҰзҗҶи®әпјҢд»ҺжҢ жӣІзәҝеҫ®еҲҶж–№зЁӢеҮәеҸ‘пјҢеҲ©з”Ёжңүйҷҗе·®еҲҶжі•жҲ–ж”ҫеӨ§зі»ж•°жі•жұӮи§Јиө·йҮҚжңәз®ұеҪўдјёзј©иҮӮзҡ„жҢ еәҰе’ҢејҜзҹ©пјӣ2пјүйҖҡиҝҮе»әз«ӢиҮӮжһ¶жңүйҷҗе…ғжЁЎеһӢпјҢйҖҡиҝҮAnsys зӯүе·Ҙе…·иҪҜ件пјҢеҲҶжһҗиҮӮжһ¶жҢ еәҰеҸҳеҪўжғ…еҶөгҖӮз»Ҹе…ёзҡ„еҠӣеӯҰе…¬ејҸи®Ўз®—иҷҪ然жҳ“дәҺи®Ўз®—жңәзј–з ҒпјҢдҪҶе…¬ејҸдёӯеҫҲеӨҡеҸӮж•°йҡҫд»ҘиҺ·еҸ–пјҢдё”з”ұдәҺжңүеҫҲеӨҡеҒҮи®ҫжқЎд»¶пјҢи®Ўз®—зІҫеәҰеҒҸдҪҺпјӣ жңүйҷҗе…ғеҲҶжһҗж–№жі•иҷҪ然еҸҜжЁЎжӢҹиө·йҮҚжңәзҡ„е…ЁйғЁе·ҘеҶөпјҢдҪҶзІҫеәҰдҫқиө–дәҺжңүйҷҗе…ғжЁЎеһӢпјҢйңҖеӨҡж¬Ўиҝӯд»ЈпјҢиҖ—ж—¶й•ҝгҖӮеӣ жӯӨпјҢиҝҷдёӨз§Қж–№жі•еқҮдёҚйҖӮз”ЁдәҺеңЁеҗҠиЈ…ж–№жЎҲ规еҲ’зі»з»ҹдёӯе®һзҺ°еҗҠиҮӮиҮӮз«ҜжҢ еәҰе®һж—¶д»ҝзңҹеҲҶжһҗе’ҢжҢ еәҰеҪўеҸҳжҳҫзӨәгҖӮ
дёәжӯӨпјҢжң¬ж–ҮжҸҗеҮәдёҖз§ҚйҖҡиҝҮеӨҡз»ҙжҸ’еҖје®һж—¶и®Ўз®—жҢ еәҰд»ҘеҸҠеҹәдәҺжӢҹеҗҲжӣІзәҝзҡ„иө·йҮҚжңәиҮӮжһ¶жҢ еәҰеҪўеҸҳжҳҫзӨәж–№жЎҲпјҢиғҪеӨҹе®һж—¶ең°иҝӣиЎҢиҮӮжһ¶жҢ еәҰеҪўеҸҳзҡ„еҠЁжҖҒи®Ўз®—е’Ңдёүз»ҙжЁЎжӢҹпјҢдҪҝеҗҠиЈ…д»ҝзңҹиҝҮзЁӢжӣҙеҠ з¬ҰеҗҲе®һйҷ…е·ҘеҶөпјҢд»ҺиҖҢиғҪеңЁдёҖе®ҡзЁӢеәҰдёҠжҸҗеүҚ规йҒҝз”ұдәҺжҢ еәҰеҪўеҸҳжүҖеҜјиҮҙзҡ„е®үе…ЁжҖ§й—®йўҳгҖӮ
1 иҮӮжһ¶еҪўеҸҳжөӢйҮҸ
еҝ«йҖҹеҸҠиҫғеҮҶзЎ®зҡ„иҮӮз«ҜжҢ еәҰе®һж—¶и®Ўз®—жҳҜе®һзҺ°дёүз»ҙиҷҡжӢҹеҗҠиЈ…д»ҝзңҹзі»з»ҹзҡ„еҝ…еӨҮе…ій”®жҠҖжңҜпјҢе®ғеҜ№з©әй—ҙзў°ж’һжЈҖжөӢгҖҒиө·йҮҚжңәжҺҘең°жҜ”еҺӢи®Ўз®—д»ҘеҸҠ规еҲ’еҸҜиЎҢеҗҠиЈ…и·Ҝеҫ„жңүзқҖйқһеёёйҮҚеӨ§еҪұе“ҚгҖӮеӣ жӯӨпјҢеҰӮдҪ•зІҫзЎ®гҖҒдҫҝжҚ·зҡ„жөӢйҮҸиҮӮжһ¶жҢ еәҰеҜ№зЎ®дҝқиө·йҮҚжңәи®ҫи®ЎжҖ§иғҪе’Ңиө·йҮҚе®үе…Ёе…·жңүйҮҚиҰҒж„Ҹд№үгҖӮ
зӣ®еүҚпјҢеҜ№дәҺиҮӮжһ¶жҢ еәҰзҡ„жөӢйҮҸпјҲеҢ…жӢ¬ж—ҒејҜжөӢйҮҸпјүдё»иҰҒжңүеҰӮдёӢеҮ з§Қпјҡ
1пјүжүӢеҠЁжөӢйҮҸ еңЁеҗҠй’©еӨ„жӮ¬жҢӮй’ўдёқпјҢйҖҡиҝҮй’ўе°әжөӢйҮҸеҮәй’ўдёқи·қеӣһиҪ¬дёӯеҝғзҡ„ж°ҙе№іи·қзҰ»пјҢ并дёҺжІЎжңүжҢ еәҰж—¶зҡ„е·ҘдҪңе№…еәҰеҜ№жҜ”пјҢд»ҺиҖҢеҫ—еҲ°иҮӮжһ¶жҢ еәҰгҖӮй’ўдёқжӮ¬жҢӮжөӢйҮҸеҸ—йЈҺеҠЁеҪұе“ҚеҫҲеӨ§пјҢдё”дәәе·ҘиҜ»ж•°зҡ„ж–№ејҸиҜҜе·®иҫғеӨ§пјҢжөӢйҮҸз»“жһңзІҫеәҰиҫғдҪҺгҖӮиҜҘж–№ејҸд»…иғҪжөӢиҜ•иө·йҮҚжңәзү№е®ҡе·ҘеҶөгҖҒзү№е®ҡеҗҠйҮҚгҖҒзү№е®ҡе§ҝжҖҒдёӢзҡ„иҮӮжһ¶жҢ еәҰеҖјгҖӮжөӢйҮҸзӮ№еҫҲеӨҡж—¶пјҢжөӢиҜ•дәәе‘ҳеҠіеҠЁејәеәҰиҫғеӨ§гҖҒиҜҜе·®иҫғеӨ§пјҢд№ҹдёҚйҖӮз”ЁдәҺеҠЁжҖҒжөӢйҮҸгҖӮ
2пјүе…үжқҹжЈҖжөӢжі•жөӢйҮҸ еңЁиҮӮжһ¶дёӨз«ҜеҲҶеҲ«е®үиЈ…еҸ‘е°„е’ҢжҺҘ收е…үжқҹи®ҫеӨҮпјҢдёҖиҲ¬дёәжҝҖе…үд»Әе’Ңзӣ®ж Үйқ¶пјҢйҖҡиҝҮеҸ‘е°„е’ҢжҺҘеҸ—е…үжқҹзҡ„дҪҚзҪ®е·®и®Ўз®—еҫ—еҲ°иҮӮжһ¶дёӢжҢ еәҰе’Ңж—ҒејҜеәҰгҖӮе…үжқҹжЈҖжөӢж–№ејҸзҡ„е®үиЈ…жҜ”иҫғеӨҚжқӮпјҢдё”еҰӮжһңжҝҖе…үжқҹиў«йҒ®жҢЎпјҢдёҚиғҪжӯЈеёёеҸ‘е°„иҮізӣ®ж Үйқ¶жҲ–еҸҚе°„еҲ°жҺўжөӢеҷЁдёҠпјҢеҲҷдёҚиғҪдҝқиҜҒжөӢйҮҸзІҫеәҰгҖӮ
3пјүеҹәдәҺеӣҫеғҸеӨ„зҗҶзҡ„жөӢйҮҸ йҖҡиҝҮиҮіе°‘2 еҸ°зӣёжңәеҜ№иҮӮжһ¶ж Үи®°зӮ№е®һж—¶жӢҚж‘„пјҢйҮҮз”ЁеӣҫеғҸеӨ„зҗҶж–№жі•еҜ№еӣҫзүҮиҝӣиЎҢжӢјжҺҘе’Ңж»Өжіўи·ҹиёӘпјҢ并еҫ—еҲ°жӢјжҺҘеҗҺеӣҫеғҸдёӯеҗ„ж Үи®°зӮ№зҡ„дёүз»ҙеқҗж ҮпјҢиҝӣиҖҢи®Ўз®—еҫ—еҲ°иҮӮжһ¶жү°еәҰгҖӮиҜҘж–№ејҸеҜ№жөӢиҜ•и®ҫеӨҮпјҲзӣёжңәпјүзҡ„иҰҒжұӮиҫғй«ҳгҖҒеҜ№зӣёжңәе®үиЈ…дҪҚзҪ®зҡ„иҰҒжұӮд№ҹеҫҲй«ҳгҖӮжӯӨеӨ–пјҢж•°жҚ®йҮҮйӣҶзҶҹиҜ»еҸҠзІҫеәҰдҫқиө–дәҺеӣҫеғҸеӨ„зҗҶз®—жі•пјҢеӣҫеғҸеӨ„зҗҶеҸҠиҪҜ件ејҖеҸ‘зҡ„йҡҫеәҰиҫғеӨ§пјҲи§Ғеӣҫ1пјүгҖӮ

еӣҫ1 иҮӮжһ¶еҪўеҸҳ
жң¬ж–ҮжҸҗеҮәзҡ„дёҖз§Қж–°зҡ„иө·йҮҚжңәиҮӮжһ¶жҢ еәҰжөӢйҮҸзі»з»ҹйҮҮз”Ёй«ҳзІҫGPS жҠҖжңҜпјҢеҲҶеҲ«еңЁиҮӮжһ¶жөӢйҮҸдҪҚзҪ®еҸҠиө·йҮҚжңәеҹәжң¬иҮӮж №йғЁе®үиЈ…й«ҳзІҫGPS 移еҠЁз«ҷе’Ңй«ҳзІҫGPS еҹәеҮҶз«ҷгҖӮжөӢйҮҸзі»з»ҹзҡ„з»“жһ„еӣҫеҰӮеӣҫ2 жүҖзӨәгҖӮ
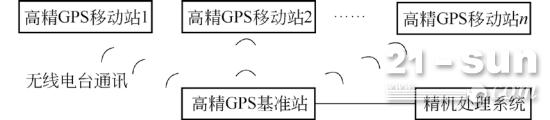
еӣҫ2 иҮӮжһ¶жҢ еәҰжөӢйҮҸзі»з»ҹз»“жһ„еӣҫ
й«ҳзІҫGPS 移еҠЁз«ҷе®үиЈ…еңЁиҮӮжһ¶зҡ„еҜ№еә”жөӢзӮ№дёҠпјҢе…¶е®үиЈ…ж•°зӣ®з”ұжөӢзӮ№ж•°еҶіе®ҡгҖӮдёәдәҶиҺ·еҫ—иҫғзІҫзЎ®зҡ„еҗҠиҮӮиҮӮз«ҜдёӢжҢ еәҰдёҺж—ҒејҜеәҰпјҢиҮіе°‘йңҖиҰҒе®үиЈ…2 еҸ°й«ҳзІҫGPS 移еҠЁз«ҷпјҢе…¶дёӯй«ҳзІҫGPS 移еҠЁз«ҷ1 е®үиЈ…еңЁиө·йҮҚжңәеҹәжң¬иҮӮиғҢжқҝзҡ„жөӢзӮ№B еӨ„пјҲжөӢзӮ№B дҪҚдәҺиө·йҮҚжңәеҹәжң¬иҮӮж №й“°зӮ№дёҺеҸҳе№…ж¶ІеҺӢзјёпјҚиҮӮжһ¶й“°зӮ№д№Ӣй—ҙпјҢдё”еңЁиө·йҮҚжңәеҹәжң¬иҮӮзҡ„дёӯеҝғзәҝдёҠпјүпјӣй«ҳзІҫGPS 移еҠЁз«ҷ2 е®үиЈ…еңЁеҗҠиҮӮжң«з«Ҝзҡ„C жөӢзӮ№еӨ„гҖӮ
й«ҳзІҫGPS еҹәеҮҶз«ҷе®үиЈ…еңЁиө·йҮҚжңәеҹәжң¬иҮӮж №йғЁпјҢдё”е°ҶиҜҘеӨ„дҪңдёәеҸӮиҖғжөӢзӮ№AгҖӮй«ҳзІҫGPS еҹәеҮҶз«ҷе°Ҷе·®еҲҶGPS ж”№жӯЈж•°йҖҡиҝҮеҶ…зҪ®ж— зәҝз”өеҸ°еҸ‘йҖҒз»ҷй«ҳзІҫGPS 移еҠЁз«ҷ1 е’Ңй«ҳзІҫGPS 移еҠЁз«ҷ2пјҢ然еҗҺй«ҳзІҫGPS 移еҠЁз«ҷ1 е’Ңй«ҳзІҫGPS移еҠЁз«ҷ2 еҸҲе°Ҷдҝ®жӯЈеҗҺзҡ„жөӢзӮ№B е’ҢжөӢзӮ№C зӣёеҜ№дәҺеҸӮиҖғжөӢзӮ№A зҡ„зІҫзЎ®дёүз»ҙеқҗж ҮпјҢйҖҡиҝҮж— зәҝз”өеҸ°дј иҫ“з»ҷй«ҳзІҫGPSеҹәеҮҶз«ҷгҖӮ
еҫ®жңәеӨ„зҗҶзі»з»ҹз”ұжҳҫзӨәеҷЁгҖҒеҚ•зүҮжңәгҖҒйҮҮйӣҶеҚЎзӯүз»„жҲҗпјҢ并еёҰдёІеҸЈгҖҒCAN еҸЈгҖҒд»ҘеӨӘзҪ‘жҺҘеҸЈгҖӮеҫ®жңәеӨ„зҗҶзі»з»ҹе®үиЈ…еңЁиө·йҮҚжңәж“ҚдҪңе®ӨпјҢдёҖж–№йқўдёҺй«ҳзІҫGPS еҹәеҮҶз«ҷиҝһжҺҘпјҢе®һж—¶йҮҮйӣҶжөӢзӮ№AгҖҒB гҖҒC зҡ„дёүз»ҙеқҗж ҮпјӣеҸҰдёҖж–№йқўпјҢжҺҘе…Ҙиө·йҮҚжңәжҖ»зәҝзҪ‘з»ңпјҢйҮҮйӣҶе№…и§’дёҺиҮӮй•ҝж•°жҚ®гҖӮеҫ®жңәеӨ„зҗҶзі»з»ҹж №жҚ®дёҠиҝ°жөӢйҮҸж•°жҚ®пјҢиҮӘеҠЁи®Ўз®—еҗҠиҮӮиҮӮз«ҜдёӢжҢ еәҰдёҺж—ҒејҜеәҰпјҢ并е®һж—¶иҫ“еҮәеңЁжҳҫзӨәеҷЁдёҠгҖӮжӯӨеӨ–пјҢд№ҹеҸҜйҖҡиҝҮеҫ®жңәеӨ„зҗҶзі»з»ҹиҮӘеёҰзҡ„дёІеҸЈгҖҒCAN еҸЈгҖҒд»ҘеӨӘзҪ‘жҺҘеҸЈпјҢе°ҶеҗҠиҮӮиҮӮз«ҜдёӢжҢ еәҰдёҺж—ҒејҜеәҰж•°жҚ®е®һж—¶иҫ“еҮәз»ҷе…¶д»–з»Ҳз«ҜгҖӮ
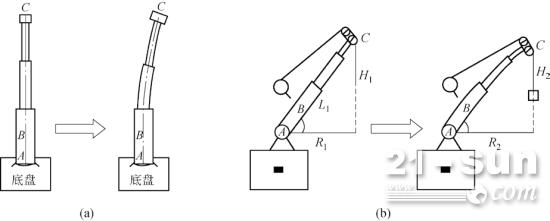
пјҲaпјүеӣһиҪ¬е№ійқўжҢ еәҰ пјҲbпјүеҸҳе№…е№ійқўжҢ еәҰ
еӣҫ3 иҮӮжһ¶жҢ еәҰжөӢйҮҸзӨәж„Ҹеӣҫ
еҰӮеӣҫ3 жүҖзӨәпјҢеҒҮе®ҡжҹҗдёҖж—¶еҲ»еҫ®жңәеӨ„зҗҶзі»з»ҹйҮҮйӣҶеҲ°зҡ„жөӢзӮ№AгҖҒB гҖҒC зҡ„дёүз»ҙеқҗж ҮеҲҶеҲ«дёәпјҡAпјҲx AпјҢy AпјҢz AпјүгҖҒBпјҲx BпјҢy BпјҢz BпјүгҖҒC пјҲx CпјҢy CпјҢz CпјүпјҢиө·йҮҚжңәе№…и§’дёҺеҗҠиҮӮй•ҝеҲҶеҲ«дёәα е’ҢL 1гҖӮиҮӮжһ¶жҢ еәҰеҪўеҸҳеә”иҖғиҷ‘еҸҳе№…е№ійқўеҶ…жҢ еәҰе’ҢеӣһиҪ¬е№ійқўеҶ…жҢ еәҰпјҲж—ҒејҜеәҰпјүгҖӮ
1пјүеҸҳе№…е№ійқўеҶ…жҢ еәҰ
ж №жҚ®жөӢйҮҸзҡ„дёүз»ҙеқҗж ҮеҖјпјҢи®Ўз®—еҫ—еҲ°жӯӨж—¶еҗҠиҮӮжң«з«Ҝи·қеҹәжң¬иҮӮж №йғЁзҡ„ж°ҙе№іи·қзҰ»е’Ңй«ҳеәҰеҲҶеҲ«дёә

иҖҢйҖҡиҝҮдёүи§’еҮҪж•°е…ізі»пјҢи®Ўз®—еҮәжңӘеҸ‘з”ҹжҢ еәҰеҪўеҸҳж—¶еҗҠиҮӮжң«з«Ҝи·қеҹәжң¬иҮӮж №йғЁзҡ„ж°ҙе№іи·қзҰ»R ´ е’Ңй«ҳеәҰH´ еҲҶеҲ«дёә

йҖҡиҝҮеҜ№жҜ”R гҖҒH дёҺR ´гҖҒH´пјҢеҚіеҸҜеҫ—еҲ°иҮӮжһ¶жң«з«ҜеҸҳе№…е№ійқўеҶ…ж°ҙе№іж–№еҗ‘е’Ңй«ҳеәҰж–№еҗ‘зҡ„жҢ еәҰеҖјеҲҶеҲ«дёә

2пјүеӣһиҪ¬е№ійқўеҶ…жҢ еәҰпјҲж—ҒејҜеәҰпјү
жөӢзӮ№B дҪҚдәҺиө·йҮҚжңәеҹәжң¬иҮӮж №й“°зӮ№дёҺеҸҳе№…ж¶ІеҺӢзјёпјҚиҮӮжһ¶й“°зӮ№д№Ӣй—ҙпјҢдё”еңЁиө·йҮҚжңәеҹәжң¬иҮӮзҡ„дёӯеҝғзәҝдёҠгҖӮз”ұдәҺжқҘиҮӘеҸҳе№…ж¶ІеҺӢзјёзҡ„еҠӣзҹ©дҪңз”ЁпјҢеҸҜи§Ҷдёәиө·йҮҚжңәеҗҠиҮӮдёҠжөӢзӮ№AиҮіжөӢзӮ№B зҡ„еҗҠиҮӮж®өжңӘеҸ‘з”ҹж—ҒејҜпјҢжҲ–ж—ҒејҜеәҰеҸҜеҝҪз•ҘдёҚи®ЎгҖӮеӣ жӯӨпјҢеңЁеӣһиҪ¬е№ійқўеҶ…пјҢеҗҠиҮӮжң«з«ҜжөӢзӮ№C дёҺжөӢзӮ№AгҖҒB жүҖеңЁзӣҙзәҝзҡ„и·қзҰ»еҚідёәжӯӨж—¶зҡ„иҮӮжһ¶ж—ҒејҜеәҰгҖӮз”ұжөӢзӮ№AгҖҒB зҡ„еқҗж ҮеҸҜеҫ—еӣһиҪ¬е№ійқўеҶ…зӣҙзәҝAB зҡ„ж–№зЁӢдёә

еӣ жӯӨпјҢеҸҜи®Ўз®—еҫ—еҲ°жөӢзӮ№C и·қзӣҙзәҝAB зҡ„и·қзҰ»дёә

ж•…пјҢжӯӨж—¶иҮӮжһ¶жң«з«Ҝзҡ„ж—ҒејҜеәҰ f =d ж—ҒејҜгҖӮжң¬ж–ҮдёӯйҮҮз”Ёй«ҳзІҫGPS жҠҖжңҜиҝӣиЎҢиө·йҮҚжңәиҮӮжһ¶жҢ еәҰжөӢзӮ№е®ҡдҪҚпјҢеҸҜд»ҘиҝӣиЎҢеҠЁжҖҒзҡ„иҝһз»ӯжөӢйҮҸпјҢи§ӮжөӢж—¶й—ҙзҹӯдё”пјҢиҝӣиЎҢиҝһз»ӯзҡ„еҠЁжҖҒжөӢйҮҸпјҢдҪҝйҖүзӮ№е·ҘдҪңжӣҙеҠ зҒөжҙ»гҖӮе®ҡдҪҚзІҫеәҰй«ҳпјҢиҜҜе·®еҸҜе°ҸдәҺ1 mmгҖӮ
2 еҹәдәҺеӨҡз»ҙжҸ’еҖјзҡ„иҮӮжһ¶еҪўеҸҳи®Ўз®—
з”ұдәҺиө·йҮҚжңәиҮӮжһ¶жҢ еәҰжөӢйҮҸжҳҜзҰ»ж•Јзҡ„пјҢеҸ—йҷҗдәҺжөӢиҜ•жқЎд»¶пјҢж— жі•жөӢиҜ•иө·йҮҚжңәиҮӮжһ¶еңЁд»»ж„Ҹиө·еҚҮгҖҒеҸҳе№…и§’еәҰд»ҘеҸҠд»»ж„ҸеҗҠйҮҚдёӢзҡ„жҢ еәҰеҪўеҸҳеҖјпјҢж•…йңҖиҰҒеҜ№жөӢйҮҸеҖјиҝӣиЎҢжҸ’еҖји®Ўз®—гҖӮжң¬и®әж–ҮжҸҗеҮәдёҖз§ҚеңЁеҗҠиЈ…д»ҝзңҹзі»з»ҹдёӯе®һзҺ°иҮӮз«ҜжҢ еәҰеҖје®һж—¶и®Ўз®—зҡ„еӨҡз»ҙжҸ’еҖјж–№жі•пјҢиҺ·еҸ–д»»ж„Ҹе№…еәҰе’Ңиө·йҮҚйҮҸдёӢзҡ„ж°ҙе№іж–№еҗ‘е’Ңй«ҳеәҰж–№еҗ‘жҢ еәҰеҖјпјҢжҢҮеҜјеҗҠиЈ…ж–№жЎҲзҡ„еҲ¶е®ҡгҖӮиҜҘж–№жі•зҡ„е…·дҪ“е®һзҺ°жӯҘйӘӨдёәпјҡ
1пјүж•°жҚ®ж ·жң¬зҡ„йҖүжӢ©
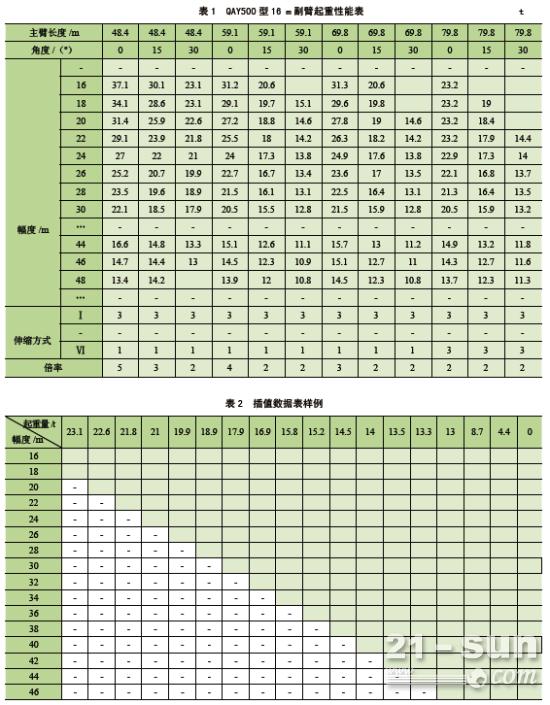
еңЁиө·йҮҚжңәжҹҗдёҖеӣәе®ҡе·ҘеҶөдёӢпјҢиҮӮз«ҜжҢ еәҰеҖјйҡҸе·ҘдҪңе№…еәҰе’Ңиө·йҮҚйҮҸзҡ„еҸҳеҢ–иҖҢеҸҳеҢ–пјҢиҖҢе·ҘдҪңе№…еәҰе’Ңиө·йҮҚйҮҸзҡ„еҸҳеҢ–еҸҲеҝ…йЎ»еңЁиө·йҮҚжңәжҖ§иғҪ表规е®ҡзҡ„еҸҳеҢ–иҢғеӣҙеҶ…пјҢж•…еҪ“йҖүжӢ©жҸ’еҖјж•°жҚ®ж ·жң¬ж—¶пјҢд№ҹд»ҘжҖ§иғҪиЎЁдёәеҸӮиҖғеҲ¶дҪңжҸ’еҖјж•°жҚ®иЎЁгҖӮд»ҘQAY500 еһӢиө·йҮҚжңәдёәдҫӢпјҢиө·йҮҚжҖ§иғҪиЎЁзҡ„еҪўејҸеҰӮиЎЁ1 жүҖзӨәпјҢз»ҝиүІйғЁеҲҶзҡ„дёҖеҲ—д»ЈиЎЁдёҖдёӘе·ҘеҶөгҖӮдёӢйқўе°Ҷд»ҘжӯӨиЎЁдёәдҫӢпјҢе…·дҪ“иҜҙжҳҺеҰӮдҪ•еҲ¶дҪңжҸ’еҖјж•°жҚ®иЎЁгҖӮ
д»ҘйЈҳзәўзҡ„е·ҘеҶөдёәдҫӢпјҢе…¶е·ҘдҪңе№…еәҰзҡ„иҢғеӣҙжҳҜзЎ®е®ҡзҡ„пјҢдёә16 пҪһ 46 mпјҢдё”е·ҘдҪңе№…еәҰдёә16 m ж—¶еҜ№еә”зҡ„иө·йҮҚйҮҸиҢғеӣҙжңҖе№ҝпјҢдёә0 пҪһ 23.1 tгҖӮйҡҸзқҖе·ҘдҪңе№…еәҰзҡ„еўһеҠ пјҢиө·йҮҚйҮҸиҢғеӣҙйҖҗжӯҘзј©е°ҸпјҢеҪ“е·ҘдҪңе№…еәҰдёә46 m ж—¶пјҢеҜ№еә”зҡ„иө·йҮҚйҮҸдёә0 пҪһ 13 tгҖӮдёәдәҶеңЁиҫғе°‘ж ·жң¬е®№йҮҸзҡ„еҹәзЎҖдёҠе°ҪйҮҸзІҫзЎ®ең°жҸ’еҖјжұӮи§ЈеҮәд»»ж„Ҹе№…еәҰе’Ңиө·йҮҚйҮҸдёӢзҡ„ж°ҙе№іе’Ңй«ҳеәҰж–№еҗ‘жҢ еәҰеҖјпјҢеҺҹе§Ӣж•°жҚ®ж ·жң¬дёӯеҝ…йЎ»еӯҳеңЁжңҖе°Ҹе№…еәҰжңҖеӨ§иө·йҮҚйҮҸгҖҒжңҖеӨ§е№…еәҰжңҖе°Ҹиө·йҮҚйҮҸгҖҒжңҖе°Ҹе№…еәҰжңҖе°Ҹиө·йҮҚйҮҸгҖҒжңҖеӨ§е№…еәҰжңҖеӨ§иө·йҮҚйҮҸеӨ„зҡ„ж°ҙе№іе’Ңй«ҳеәҰж–№еҗ‘жҢ еәҰеҖјгҖӮдёәдәҶйҖҡиҝҮжҸ’еҖјиҫғдёәзІҫзЎ®ең°иҺ·еҫ—18 m е№…еәҰдёӢиө·йҮҚйҮҸдёә5 t ж—¶ж°ҙе№і/ й«ҳеәҰж–№еҗ‘жҢ еәҰеҖјпјҢеҺҹе§Ӣж ·жң¬дёӯеҝ…йЎ»жңү18 m е№…еәҰдёӢиө·йҮҚйҮҸе°ҸдәҺжҲ–зӯүдәҺ5 t жүҖеҜ№еә”зҡ„ж°ҙе№і/ й«ҳеәҰж–№еҗ‘жҢ еәҰеҖјгҖӮеӣ жӯӨпјҢеҝ…йЎ»еўһеҠ жңҖеӨ§е№…еәҰжңҖе°Ҹиө·йҮҚйҮҸгҖҒжңҖе°Ҹе№…еәҰжңҖе°Ҹиө·йҮҚйҮҸеӨ„зҡ„ж°ҙе№іе’Ңй«ҳеәҰж–№еҗ‘жҢ еәҰеҖјдҪңдёәеҺҹе§Ӣж ·жң¬ж•°жҚ®пјҢеўһеҠ еҺҹеҲҷдёә

ејҸдёӯпјҡΔT дёәеўһйҮҸпјӣT Q дёәжңҖеӨ§е№…еәҰеӨ„еҜ№еә”зҡ„жңҖеӨ§иө·йҮҚйҮҸпјӣn дёәиө·йҮҚйҮҸж•°жҚ®зӮ№ж•°зӣ®пјҢе»әи®®дёә3гҖӮ
еӣ жӯӨпјҢиҝҳйңҖиҰҒеўһеҠ n дёӘиө·йҮҚйҮҸж•°жҚ®зӮ№пјҢеҲҶеҲ«дёә

ж №жҚ®дёҠиҝ°еҺҹеҲҷпјҢд»ҘQAY500 еһӢиө·йҮҚжңәдёәдҫӢпјҢиЎЁ1 дёӯйЈҳзәўзҡ„е·ҘеҶөйңҖиҰҒзҡ„жҸ’еҖјж•°жҚ®еҰӮиЎЁ2 жүҖзӨәпјҢиЎЁдёӯзәўиүІйғЁеҲҶдёәжҸ’еҖјжүҖйңҖжҸҗдҫӣзҡ„ж ·жң¬ж•°жҚ®—ж°ҙе№іж–№еҗ‘жҲ–й«ҳеәҰж–№еҗ‘жҢ еәҰеҖјгҖӮ
2пјүжҸ’еҖјз®—жі•
д»ҘиЎЁ2 дёӯжҸҗдҫӣзҡ„ж ·жң¬ж•°жҚ®пјҢжҸ’еҖјжұӮи§Јй«ҳеәҰж–№еҗ‘жҢ еәҰеҖјиҝҮзЁӢдёәпјҡеңЁеҗҠиЈ…д»ҝзңҹзі»з»ҹдёӯпјҢиө·йҮҚжңәеңЁиө·еҗҠзӮ№зҡ„еҲқе§Ӣе·ҘдҪңе№…еәҰжҳҜе·ІзҹҘзҡ„пјҢеҒҮе®ҡдёәR иө·гҖӮеңЁеҸҳе№…иҝҗеҠЁиҝҮзЁӢдёӯпјҢиө·йҮҚжңәиҮӮз«ҜжҢ еәҰдёҚж–ӯеҸҳеҢ–гҖӮеҒҮе®ҡеҸҳе№…жӯҘй•ҝдёәΔr пјҲи¶ҙжқҶдёәжӯЈпјҢжҠ¬иҮӮдёәиҙҹпјүпјҢз»ҸиҝҮn дёӘеҸҳе№…жӯҘй•ҝд№ӢеҗҺпјҢеҪ“еүҚзҡ„е№…й•ҝдёә


иҜҘжҸ’еҖји®Ўз®—ж–№жі•дҫҝдәҺзј–зЁӢе®һзҺ°пјҢж»Ўи¶іеҗҠиЈ…д»ҝзңҹзі»з»ҹдёӯеҜ№иҮӮз«ҜжҢ еәҰи®Ўз®—е®һж—¶жҖ§зҡ„иҰҒжұӮпјӣйҖӮз”ЁдәҺиө·йҮҚжңәжүҖжңүзҡ„е·ҘеҶөзұ»еһӢпјҢдё”д»Ҙе®һжөӢеҺҹе§Ӣж•°жҚ®дёәеҹәзЎҖпјҢзІҫеәҰиҫғй«ҳгҖӮ
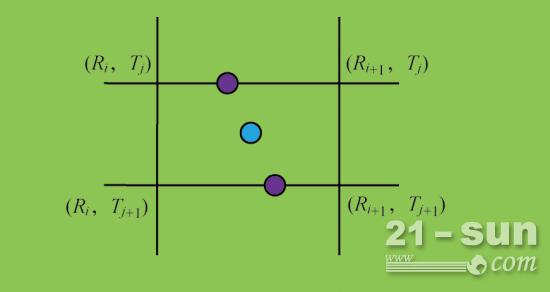
еӣҫ4 еҸҢзәҝжҖ§зҪ‘ж јиҠӮзӮ№дәҢз»ҙжҸ’еҖј
3 еҗҠ装规еҲ’зі»з»ҹдёӯеҪўеҸҳжЁЎжӢҹ
еңЁеҗҠ装规еҲ’еҸҠд»ҝзңҹзі»з»ҹдёӯпјҢз”ұдәҺзӣ®еүҚзҡ„еҗҠиЈ…д»ҝзңҹзі»з»ҹеқҮе°Ҷиө·йҮҚжңәиҮӮжһ¶дҪңеҲҡдҪ“иҖғиҷ‘пјҢжңӘиҖғиҷ‘жҢ еәҰеҪўеҸҳеҜ№иө·йҮҚжңәеҗҠиЈ…жҖ§иғҪпјҲеҰӮиө·еҗҠиғҪеҠӣгҖҒе·ҘдҪңе№…еәҰгҖҒиө·йҮҚеҠӣзҹ©зҷҫеҲҶжҜ”зӯүжҖ§иғҪжҢҮж ҮпјүеҸҠд»ҝзңҹиҝҗеҠЁзҡ„еҪұе“ҚпјҢжӣҙжңӘе°ҶиҮӮжһ¶зҡ„жҢ еәҰеҪўеҸҳйҖҡиҝҮдёүз»ҙжЁЎжӢҹиҝӣиЎҢзӣҙи§Ӯең°еұ•зӨәпјҢеҜјиҮҙеҲ¶е®ҡзҡ„еҗҠиЈ…жҢҮеҜјж–№жЎҲдёҺе®һйҷ…еҗҠиЈ…дҪңдёҡжғ…еҶөе·®еҲ«иҫғеӨ§гҖӮеӣ жӯӨпјҢйҖҡиҝҮиҝҷдәӣд»ҝзңҹзі»з»ҹеҫ—еҲ°зҡ„еҗҠиЈ…иҝҗеҠЁж–№жЎҲеҸҜеҸӮиҖғжҖ§дёҚејәпјҢе®һйҷ…жҢҮеҜјж„Ҹд№үдёҚеӨ§гҖӮ
жң¬ж–ҮжҸҗеҮәдёҖз§ҚеҹәдәҺжӢҹеҗҲжӣІзәҝзҡ„иө·йҮҚжңәиҮӮжһ¶жҢ еәҰеҪўеҸҳжҳҫзӨәж–№жЎҲпјҢиғҪеӨҹе®һж—¶ең°иҝӣиЎҢиҮӮжһ¶жҢ еәҰеҪўеҸҳзҡ„дёүз»ҙжЁЎжӢҹгҖӮ
1пјүе»әз«ӢеҗҠиҮӮдёүз»ҙжЁЎеһӢ
д»ҘжҹҗеһӢе…Ёең°йқўиө·йҮҚжңәдёәдҫӢпјҢе…¶7 иҠӮеҗҠиҮӮеқҮйҮҮз”ЁжӨӯеңҶеҪўжҲӘйқўпјҢеҰӮеӣҫ5a жүҖзӨәгҖӮдёәдәҶеңЁеҗҠиЈ…д»ҝзңҹиҝҮзЁӢдёӯеҝ«йҖҹи·ҹиёӘжҢ еәҰжӢҹеҗҲжӣІзәҝпјҢиҝҷйҮҢе°ҶеҗҠиҮӮиҝӣиЎҢиҝ‘дјјеӨ„зҗҶгҖӮд»Һеӣҫ5aеҸҜд»ҘзңӢеҮәпјҢжӨӯеңҶеҪўжҲӘйқўеҲҶдёәй•ҝиҪҙе’ҢзҹӯиҪҙпјҢж•…е°ҶеҗҠиҮӮжҲӘйқўиҝ‘дјјжҲҗй•ҝж–№еҪўпјҢеҚіжӨӯеңҶеҪўжҲӘйқўзҡ„й•ҝиҪҙдёәй•ҝж–№еҪўзҡ„й•ҝпјҢзҹӯиҪҙдёәй•ҝж–№еҪўзҡ„е®ҪгҖӮз»ҸиҝҮжҲӘйқўзҡ„иҝ‘дјјеӨ„зҗҶпјҢB02 е…Ёең°йқўиө·йҮҚжңәзҡ„7 иҠӮеҗҠиҮӮеҸҜеҲҶеҲ«зӯүж•ҲжҲҗ7 дёӘй•ҝж–№дҪ“гҖӮд»Ҙеҹәжң¬иҮӮдёәдҫӢпјҢж №жҚ®еҗҠиҮӮзҡ„е®һйҷ…е°әеҜёдҝЎжҒҜпјҢеҫ—еҮәеҗҠиҮӮдёүз»ҙзӯүж•ҲжЁЎеһӢеҰӮеӣҫ5b жүҖзӨәгҖӮ
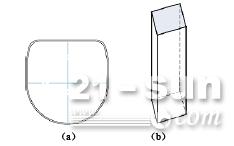
пјҲaпјүеҗҠиҮӮжҲӘйқўеӣҫ пјҲbпјүеҹәжң¬иҮӮзҡ„дёүз»ҙжЁЎеһӢ
еӣҫ5 иө·йҮҚжңәеҗҠиҮӮжҲӘйқўеҸҠжЁЎеһӢ
2пјүеҹәдәҺ专家з»ҸйӘҢзҡ„еҗҠиҮӮеҲҶж®өзӯ–з•Ҙ
дёәдәҶжӣҙеҠ е№іж»‘ең°и·ҹиёӘжҢ еәҰжӢҹеҗҲжӣІзәҝпјҢеҝ…йЎ»е°Ҷеҗ„иҠӮеҗҠиҮӮзҡ„й•ҝж–№дҪ“жЁЎеһӢиҝӣдёҖжӯҘз»ҶеҲҶжҲҗиӢҘе№Іж®өй•ҝж–№дҪ“пјҢиҝҳиҰҒе…јйЎҫжЁЎеһӢзҡ„жёІжҹ“йҖҹеәҰдёҺз”»йқўж•ҲжһңгҖӮеӣ жӯӨпјҢеҰӮдҪ•еҲ’еҲҶеҗ„иҠӮеҗҠиҮӮзҡ„ж®өж•°е°ұжҲҗдёәиҮӮжһ¶жҢ еәҰжҳҫзӨәйқһеёёе…ій”®зҡ„дёҖзҺҜгҖӮжң¬ж–Үд»Ҙеҹәжң¬иҮӮдёүз»ҙжЁЎеһӢдёәдҫӢпјҢжқҘиҜҙжҳҺеҗҠиҮӮзҡ„еҲҶж®өзӯ–з•ҘгҖӮ
ж №жҚ®дё“家з»ҸйӘҢпјҢеҪ“еҗҠиҮӮзҡ„еҲҶж®өж•°дҪҝжҜҸдёҖдёӘй•ҝж–№дҪ“еҲҶж®өе№іеқҮжүҝжӢ…иҜҘиҠӮеҗҠиҮӮжңҖеӨ§жҢ еәҰеҪўеҸҳжҜ”зҡ„еӨ§зәҰ1/100 ж—¶пјҢе°ұиғҪеҫҲеҘҪең°еҚҸи°ғжЁЎеһӢжёІжҹ“йҖҹеәҰе’ҢжҢ еәҰеҪўеҸҳзҡ„е№іж»‘гҖӮеҲҷеҹәжң¬иҮӮзҡ„еҲҶж®өж•°n 0 ж»Ўи¶і

ејҸдёӯпјҡl 0 дёәеҹәжң¬иҮӮзҡ„й•ҝеәҰпјҢl 0_max дёәеҹәжң¬иҮӮжң«з«ҜеңЁзҡ„жңҖеӨ§жҢ еәҰеҖјгҖӮ
ж №жҚ®еҲҶж®өзӯ–з•ҘпјҢе°ҶиҜҘиө·йҮҚжңәзҡ„еҗҠиҮӮе…ұеҲҶдёәn ж®өй•ҝж–№дҪ“жЁЎеһӢпјҢе…¶дёӯеҹәжң¬иҮӮеҲҶдёәn 0 ж®өпјҢ第1 иҠӮдјёзј©иҮӮеҲҶдёәn 1ж®өпјҢ第2 иҠӮдјёзј©иҮӮеҲҶдёәn 2 ж®өпјҢ第3 иҠӮдјёзј©иҮӮеҲҶдёәn 3 ж®өпјҢ第4 иҠӮдјёзј©иҮӮеҲҶдёәn 4 ж®өпјҢ第5 иҠӮдјёзј©иҮӮеҲҶдёәn 5 ж®өпјҢ第6 иҠӮдјёзј©иҮӮеҲҶдёәn 6 ж®өгҖӮ
йҮҮз”ЁеҹәдәҺжӢҹеҗҲжӣІзәҝзҡ„еҗҠиҮӮжҢ еәҰеҠЁжҖҒжЁЎжӢҹжі•пјҢеҚіеңЁеҗҠиЈ…д»ҝзңҹиҝҮзЁӢдёӯпјҢе»әз«Ӣд»Ҙиө·йҮҚжңәеӣһиҪ¬дёӯеҝғдёәеҺҹзӮ№зҡ„дёүз»ҙз©әй—ҙеқҗж Үзі»пјҢеҰӮеӣҫ6 жүҖзӨәгҖӮе°ҶB 02 еҗҠиҮӮдёӯжҜҸж®өй•ҝж–№дҪ“жЁЎеһӢзҡ„дёӯеҝғзӮ№еқҗж Үдҫқж¬Ўи®°дёәQ1пјҲx 1, y 1, z 1пјүгҖҒQ2пјҲx 2, y 2,z 2пјүгҖҒ……гҖҒQnпјҲxn , yn , znпјүпјҢеҲҷиҝһжҺҘеҗ„дёӘдёӯеҝғзӮ№жһ„жҲҗдёӯиҪҙзәҝlпјҢдҪҝl е°ҪйҮҸйҖјиҝ‘жӯӨж—¶зҡ„жҢ еәҰжӢҹеҗҲжӣІзәҝпјҢе°ұе®һзҺ°дәҶеҗҠиҮӮзҡ„жҢ еәҰжҳҫзӨәгҖӮ
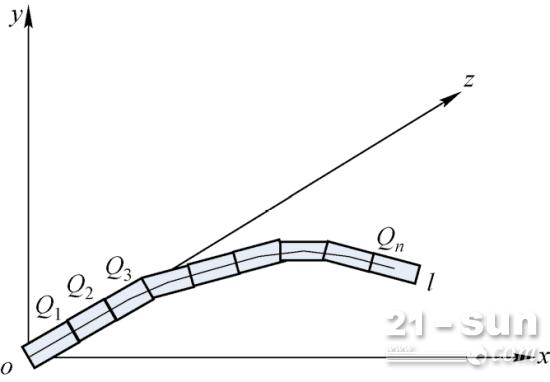
еӣҫ6 иө·йҮҚжңәеҗҠиҮӮдёүз»ҙз©әй—ҙеқҗж Үзі»
еҒҮе®ҡжҹҗдёҖж—¶еҲ»иө·йҮҚжңәзҡ„еҸҳе№…и§’еәҰдёәα пјҢеӣһиҪ¬и§’еәҰдёәβ пјҢжҖ»иҮӮй•ҝдёәL пјҢ6 иҠӮдјёзј©иҮӮзҡ„дјёеҮәйҮҸеҲҶеҲ«дёәl1гҖҒl2гҖҒl3гҖҒl4гҖҒl5гҖҒl6пјҢеҗҠйҮҚеҖјдёәT гҖӮеҲҷжңүеҹәжң¬иҮӮдёӯжҜҸж®өзҡ„й•ҝеәҰдёә

еҗҢзҗҶпјҢе…¶д»–6 иҠӮдјёзј©иҮӮдёӯжҜҸж®өзҡ„й•ҝеәҰеҲҶеҲ«дёә
иӢҘзӮ№QtпјҲxt , yt , ztпјүпјҲ1 ≤t ≤n пјүжҳҜжҹҗдёӘеҲҶж®өй•ҝж–№дҪ“зҡ„дёӯеҝғзӮ№пјҢеҲҷиҜҘзӮ№еӨ„зҡ„иҮӮй•ҝL Q еҸҜи®Ўз®—дёә

ж №жҚ®иҮӮй•ҝL QгҖҒеҸҳе№…и§’еәҰдёәα гҖҒеҗҠйҮҚеҖјдёәT пјҢжҹҘиҜўжҢ еәҰжӢҹеҗҲжӣІзәҝеҚіеҸҜд»ҘиҺ·еҫ—зӮ№Qt еӨ„зҡ„жҢ еәҰеҪўеҸҳеҖјΔy е’Ңе№…еәҰеҖјR QпјҢеҲҷзӮ№Qt з»ҸиҝҮжҢ еәҰеҪўеҸҳд№ӢеҗҺзҡ„Y еқҗж Үдёә
![]()
зӮ№Qt зҡ„X еқҗж ҮдёҺZ еқҗж ҮиЎЁзӨәеҰӮеӣҫ7 жүҖзӨәгҖӮеңЁеӣҫдёӯпјҢеҒҮе®ҡзӮ№Qt з»ҸиҝҮжҢ еәҰеҪўеҸҳд№ӢеҗҺеңЁXZ е№ійқўеҶ…зҡ„жҠ•еҪұдёәQt´пјҢеҲҷзӮ№Qt з»ҸиҝҮжҢ еәҰеҪўеҸҳд№ӢеҗҺзҡ„X еқҗж ҮдёҺZ еқҗж ҮеҲҶеҲ«дёә

еңЁеҗҠиЈ…д»ҝзңҹиҝҗеҠЁиҝҮзЁӢдёӯпјҢж №жҚ®жҢ еәҰжӢҹеҗҲжӣІзәҝпјҢжҢүз…§дёҠиҝ°ж–№жі•е®һж—¶и®Ўз®—иө·йҮҚжңәеҗ„еҲҶж®өй•ҝж–№дҪ“жЁЎеһӢдёӯеҝғзӮ№еқҗж ҮпјҢ并д»ҘжӯӨжһ„йҖ иө·йҮҚжңәиҮӮжһ¶еҗ„еҲҶж®өй•ҝж–№дҪ“жЁЎеһӢпјҢеҚіеҸҜе®һзҺ°иө·йҮҚжңәиҮӮжһ¶жҢ еәҰзҡ„еҠЁжҖҒжҳҫзӨәгҖӮ

еӣҫ7 иө·йҮҚжңәиҮӮжһ¶еҗ„зӮ№жҢ еәҰеқҗж ҮиЎЁзӨәзӨәж„Ҹеӣҫ
4 з»“и®ә
жң¬ж–Үи®ҫи®ЎдәҶдёҖз§ҚйҖҡиҝҮй«ҳзІҫGPS иҝӣиЎҢиө·йҮҚжңәиҮӮжһ¶жҢ еәҰжөӢйҮҸпјҢеҶҚйҖҡиҝҮеӨҡз»ҙжҸ’еҖје®һж—¶и®Ўз®—жҢ еәҰд»ҘеҸҠеҹәдәҺжӢҹеҗҲжӣІзәҝзҡ„иө·йҮҚжңәиҮӮжһ¶жҢ еәҰеҪўеҸҳжҳҫзӨәж–№жЎҲпјҢиғҪеӨҹе®һж—¶ең°иҝӣиЎҢиҮӮжһ¶жҢ еәҰеҪўеҸҳзҡ„еҠЁжҖҒи®Ўз®—е’Ңдёүз»ҙжЁЎжӢҹпјҢи§ЈеҶіеҪ“еүҚеҗҠиЈ…д»ҝзңҹиҝҮзЁӢдёӯж— жі•е®һж—¶и®Ўз®—жҢ еәҰпјҢд»ҘеҸҠеңЁдёүз»ҙзі»з»ҹдёӯд»ҝзңҹжЁЎжӢҹиҮӮжһ¶еҪўеҸҳзҡ„й—®йўҳпјҢдҪҝеҗҠиЈ…д»ҝзңҹзі»з»ҹжӣҙеҠ иҙҙиҝ‘зңҹе®һжғ…еҶөпјҢеҗҠ装规еҲ’з»“жһңжӣҙеҠ еҮҶзЎ®гҖҒеҸҜйқ гҖӮ






















