



0
еј•иЁҖ
йӣҶиЈ…з®ұе ҶеңәдҪңдёҡж•ҲзҺҮжҳҜеҪұе“Қз ҒеӨҙеүҚжІҝиҲ№иҲ¶иЈ…еҚёж•ҲзҺҮзҡ„йҮҚиҰҒеӣ зҙ д№ӢдёҖгҖӮеҰӮдҪ•еҜ№е ҶеңәеҶ…жңүйҷҗзҡ„иЈ…еҚёдҪңдёҡи®ҫеӨҮиҝӣиЎҢеҗҲзҗҶи°ғеәҰпјҢд»ҺиҖҢзј©зҹӯиҲ№иҲ¶йқ жіҠж—¶й—ҙпјҢжҳҜеҪ“еүҚйӣҶиЈ…з®ұжёҜеҸЈйқўдёҙзҡ„йҮҚиҰҒз ”з©¶иҜҫйўҳгҖӮеңәжЎҘе’ҢеҶ…йӣҶеҚЎжҳҜйӣҶиЈ…з®ұжёҜеҸЈе ҶеңәдёӯиҙҹиҙЈеһӮзӣҙдҪңдёҡе’Ңж°ҙе№іиҝҗиҫ“зҡ„йҮҚиҰҒи®ҫеӨҮпјҢ2з§Қи®ҫеӨҮзҡ„дҪңдёҡж•ҲзҺҮзӣҙжҺҘеҪұе“ҚеІёжЎҘиЈ…еҚёиҲ№дҪңдёҡж•ҲзҺҮпјҢдёәйҷҚдҪҺдјҳеҢ–йҡҫеәҰпјҢзӣ®еүҚеӨ§еӨҡеӯҰиҖ…еҸӘй’ҲеҜ№еңәжЎҘжҲ–йӣҶеҚЎеҚ•з§Қи®ҫеӨҮзҡ„и°ғеәҰдјҳеҢ–ејҖеұ•з ”究гҖӮ
жң¬ж–Үд»ҘиЈ…иҲ№дҪңдёҡж—¶й—ҙжңҖзҹӯдёәзӣ®ж ҮпјҢиҖғиҷ‘еңәжЎҘй—ҙе®үе…Ёи·қзҰ»е’ҢиЈ…иҲ№д»»еҠЎдјҳе…ҲйЎәеәҸзӯүзҺ°е®һйңҖжұӮпјҢжҸҗеҮәйқўеҗ‘еӨҡз®ұеҢәдҪңдёҡзҡ„еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰж–№жі•пјҢ并й’ҲеҜ№й—®йўҳзү№еҫҒпјҢе°ҶйҒ—дј з®—жі•е’ҢеҗҜеҸ‘ејҸ规еҲҷзӣёз»“еҗҲпјҢи®ҫи®Ўи°ғеәҰз®—жі•пјҢ并еҹәдәҺе Ҷеңәе®һйҷ…иҝҗиҗҘиҝҮзЁӢжҸҗеҮәз®—жі•ж”№иҝӣж“ҚдҪңпјҢжҸҗеҚҮз®—жі•жұӮи§Јж•ҲзҺҮе’ҢжұӮи§Јж•ҲжһңгҖӮ
1
еҚҸеҗҢи°ғеәҰж–№жі•
1.1еңәжҷҜжҸҸиҝ°
иЈ…иҲ№е’ҢеҚёиҲ№дҪңдёҡжҳҜйӣҶиЈ…з®ұжёҜеҸЈеёёи§Ғзҡ„2з§ҚдҪңдёҡж–№ејҸпјҢдәҢиҖ…дҪңдёҡиҝҮзЁӢзӣёеҸҚгҖӮеңЁе®һйҷ…дҪңдёҡдёӯпјҢдёҺеҚёиҲ№дҪңдёҡзӣёжҜ”пјҢеҮәеҸЈйӣҶиЈ…з®ұиЈ…иҲ№дҪңдёҡеҜ№еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰж•ҲзҺҮжңүжӣҙй«ҳзҡ„иҰҒжұӮпјҢеӣ жӯӨз ”з©¶иЈ…иҲ№дҪңдёҡжЁЎејҸдёӢзҡ„еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰжңүжӣҙеӨ§зҡ„е®һйҷ…д»·еҖјгҖӮиЈ…иҲ№дҪңдёҡжөҒзЁӢи§Ғеӣҫ1пјҢйӣҶиЈ…з®ұиҲ№йқ жіҠеҗҺпјҢз”ұеңәжЎҘеҜ№жҸҗеүҚе Ҷж”ҫеңЁе ҶеңәдёҠзҡ„еҮәеҸЈйӣҶиЈ…з®ұиҝӣиЎҢжҸҗз®ұдҪңдёҡпјҢеІёжЎҘиҙҹиҙЈеңЁжө·дҫ§дёәйӣҶиЈ…з®ұиҲ№иҲ¶жү§иЎҢиЈ…иҲ№дҪңдёҡпјҢеҶ…йӣҶеҚЎиҙҹиҙЈеңЁжө·дҫ§дёҺйҷҶдҫ§д№Ӣй—ҙиҝӣиЎҢйӣҶиЈ…з®ұж°ҙе№іиҝҗиҫ“гҖӮ
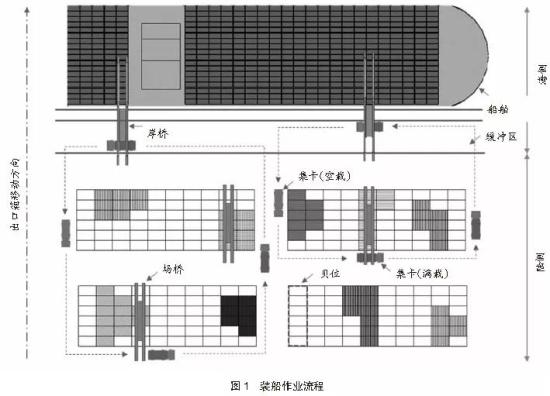
еңЁиЈ…иҲ№дҪңдёҡиҝҮзЁӢдёӯпјҢжёҜеҸЈж“ҚдҪңдәәе‘ҳж №жҚ®еҮәеҸЈйӣҶиЈ…з®ұйҮҸгҖҒеҮәеҸЈйӣҶиЈ…з®ұе ҶеӯҳдҪҚзҪ®е’ҢиҲ№иҲ¶й…ҚиҪҪи®ЎеҲ’зӯүпјҢ并иҖғиҷ‘еңәжЎҘе’ҢеҶ…йӣҶеҚЎдҪңдёҡиғҪеҠӣе’ҢдҪңдёҡ规еҲҷзӯүеӣ зҙ пјҢеҜ№дәҢиҖ…иҝӣиЎҢй…ҚзҪ®е№¶еҲ¶е®ҡиҒ”еҗҲи°ғеәҰдҪңдёҡж–№жЎҲпјҢд»ҺиҖҢдҪҝжҖ»иЈ…иҲ№д»»еҠЎе®ҢжҲҗж—¶й—ҙе’ҢиҲ№иҲ¶еңЁжёҜйқ жіҠж—¶й—ҙжңҖзҹӯгҖӮдёәжҳҺзЎ®еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰдјҳеҢ–й—®йўҳиҫ№з•ҢпјҢдҪңеҮә3зӮ№еҒҮи®ҫпјҡ
-
еҫ…иЈ…иҲ№еҮәеҸЈйӣҶиЈ…з®ұзҡ„е ҶеӯҳдҪҚзҪ®е’ҢиЈ…иҲ№йЎәеәҸеҸҜйҖҡиҝҮе Ҷеңәе Ҷеӯҳи®ЎеҲ’е’ҢиҲ№иҲ¶й…ҚиҪҪи®ЎеҲ’иҺ·зҹҘгҖӮ
-
еңәжЎҘе’ҢеҶ…йӣҶеҚЎ1ж¬Ўд»…еӨ„зҗҶ1дёӘйӣҶиЈ…з®ұгҖӮ
-
еңәжЎҘд»…иғҪеңЁеҗҢжҺ’з®ұеҢәй—ҙ移еҠЁгҖӮеңЁжёҜеҸЈе®һйҷ…з”ҹдә§иҝҮзЁӢдёӯпјҢиҪЁйҒ“ејҸйҫҷй—ЁеҗҠж— жі•еңЁдёҚеҗҢжҺ’з®ұеҢәй—ҙиҝӣиЎҢи·Ёз®ұеҢәдҪңдёҡпјҢиҖҢиҪ®иғҺеҗҠеңЁдёҚеҗҢжҺ’з®ұеҢәй—ҙи·Ёи¶Ҡж—¶жүҖйңҖж—¶й—ҙиҫғй•ҝпјҢдёҘйҮҚеҪұе“Қе ҶеңәиҝҗиҗҘж•ҲзҺҮпјҢеӣ жӯӨдёҚиҖғиҷ‘еңәжЎҘеңЁдёҚеҗҢжҺ’з®ұеҢәй—ҙи·Ёи¶Ҡзҡ„жғ…еҶөгҖӮ
1.2дёӨйҳ¶ж®өи°ғеәҰж–№жі•и®ҫи®Ў
з”ұдәҺеңәжЎҘ移еҠЁйҖҹеәҰж…ўгҖҒж•°йҮҸжңүйҷҗдё”дҪңдёҡи°ғеәҰиҝҮзЁӢеӨҚжқӮпјҢеңЁе®һйҷ…иҝҗиҗҘдёӯеңәжЎҘзҡ„й…ҚзҪ®е’Ңи°ғеәҰжҜ”еҶ…йӣҶеҚЎе…·жңүжӣҙй«ҳзҡ„дјҳе…Ҳзә§пјҢеӣ жӯӨе»әз«ӢдёӨйҳ¶ж®өи°ғеәҰж–№жі•еҲҶеҲ«еҜ№еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҝӣиЎҢи°ғеәҰпјҢе…¶дёӯпјҡ第1йҳ¶ж®өеҜ№еңәжЎҘиҝӣиЎҢи°ғеәҰпјӣ第2йҳ¶ж®өеҹәдәҺ第1йҳ¶ж®өжүҖеҫ—и°ғеәҰз»“жһңеҜ№еҶ…йӣҶеҚЎиҝӣиЎҢи°ғеәҰгҖӮ
1.2.1第1йҳ¶ж®өи°ғеәҰж–№жі•
第1йҳ¶ж®өи°ғеәҰзҡ„дҪңз”ЁеңЁдәҺдјҳеҢ–з”ҹжҲҗеҗҲзҗҶзҡ„еңәжЎҘдҪңдёҡеәҸеҲ—пјҢд»ҺиҖҢжңҖе°ҸеҢ–дёҚеҗҢеңәжЎҘзҡ„д»»еҠЎйҮҸе·®ејӮпјҢд»ҺиҖҢеқҮиЎЎеңәжЎҘдҪңдёҡж—¶й—ҙпјҢиӢҘжҹҗи°ғеәҰж–№жЎҲдёӯеӯҳеңЁдёҚеҗҢеңәжЎҘзҡ„д»»еҠЎж•°йҮҸе·®ејӮиҝҮеӨ§зҡ„жғ…еҶөпјҢеҲҷиҜҘи°ғеәҰж–№жЎҲжҳҫ然йқһжңҖдјҳгҖӮеҹәдәҺжӯӨпјҢжҸҗеҮәеҗ„жҺ’з®ұеҢәеҲҶй…ҚеңәжЎҘж•°дёҚеқҮиЎЎйҳҲеҖјLine 1е’ҢеҗҢжҺ’з®ұеҢәеңәжЎҘд»»еҠЎйҮҸдёҚеқҮиЎЎйҳҲеҖјLine 2пјҢд»Ҙйҷҗе®ҡдёҚеҗҢеңәжЎҘд№Ӣй—ҙзҡ„д»»еҠЎйҮҸдёҚеқҮиЎЎзЁӢеәҰгҖӮжӯӨеӨ–пјҢеңЁеңәжЎҘи°ғеәҰиҝҮзЁӢдёӯйңҖиҰҒдҝқиҜҒжүҖжңүйӣҶиЈ…з®ұд»»еҠЎйғҪиғҪеӨҹиў«еҲҶй…Қз»ҷеңәжЎҘжү§иЎҢпјҢеҚіжүҖжңүеңәжЎҘжүҖеҲҶй…Қзҡ„дҪңдёҡеҢәеҹҹеҢ…еҗ«жүҖжңүеҫ…иЈ…иҲ№йӣҶиЈ…з®ұгҖӮеҗҢж—¶пјҢжҜҸжҺ’з®ұеҢәжүҖеҲҶй…Қзҡ„еңәжЎҘж•°д№Ӣе·®дёҚи¶…иҝҮLine 1пјҢжҜҸжҺ’з®ұеҢәеҶ…еҗ„еңәжЎҘд»»еҠЎйҮҸд№Ӣе·®дёҚи¶…иҝҮLine 2гҖӮ
1.2.2第2йҳ¶ж®өи°ғеәҰж–№жі•
第2йҳ¶ж®өеҹәдәҺ第1йҳ¶ж®өи°ғеәҰз»“жһңеҜ№еҶ…йӣҶеҚЎиҝӣиЎҢи°ғеәҰпјҢдҪҝжҖ»д»»еҠЎе®ҢжҲҗж—¶й—ҙжңҖзҹӯгҖӮеңЁжӯӨиҝҮзЁӢдёӯпјҢеә”дҝқиҜҒеҗ„з®ұеҢәеҗ„ж—¶ж®өеңәжЎҘжҖ»ж•°дёҚи¶…иҝҮ3еҸ°пјҢ1еҸ°еңәжЎҘеңЁдёҖдёӘж—¶ж®өеҶ…дёҚиғҪ移е…Ҙе’Ң移еҮәеҗҢдёҖдёӘз®ұеҢәгҖӮеңәжЎҘйңҖиҰҒеңЁйӣҶиЈ…з®ұе ҶеӯҳдҪҚзҪ®дҪңдёҡзӣҙеҲ°е®ҢжҲҗиҜҘйӣҶиЈ…з®ұжҸҗеҸ–ж“ҚдҪңпјҢ并且еңЁжӯӨиҝҮзЁӢдёӯеҶ…йӣҶеҚЎеә”еңЁзӣёеә”д»»еҠЎиҙқдҪҚеҒңй©»зӣҙиҮід»»еҠЎз»“жқҹпјҢеӣ жӯӨеҸӘжңүеңәжЎҘе’ҢеҶ…йӣҶеҚЎйғҪеҲ°иҫҫд»»еҠЎдҪҚзҪ®еҗҺжүҚејҖе§ӢиҝӣиЎҢжҸҗз®ұдҪңдёҡгҖӮ
1.3и°ғеәҰз®—жі•
з”ұдәҺеңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰжҳҜе…ёеһӢзҡ„NP-hardй—®йўҳпјҢдј з»ҹзҡ„ж··еҗҲж•ҙ数规еҲ’зІҫзЎ®ејҸжҗңзҙўз®—жі•ж— жі•ж»Ўи¶іе®һйҷ…иЈ…иҲ№дҪңдёҡи°ғеәҰйңҖжұӮпјҢиҖҢе…·еӨҮиҫғејәйІҒжЈ’жҖ§е’Ңе…ЁеұҖжҗңзҙўжҖ§зӯүзү№зӮ№зҡ„йҒ—дј з®—жі•еңЁNP-hardйҡҫйўҳжұӮи§Јж–№йқўеҫ—еҲ°е№ҝжіӣеә”з”ЁпјҢеӣ жӯӨеҹәдәҺйҒ—дј з®—жі•еҜ№еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰй—®йўҳиҝӣиЎҢз ”з©¶гҖӮиҖғиҷ‘йҒ—дј з®—жі•зҡ„йҡҸжңәжҖ§пјҢиӢҘдёӨйҳ¶ж®өи°ғеәҰиҝҮзЁӢеқҮйҮҮз”ЁйҒ—дј з®—жі•е°ҶеӨ§е№…еўһеҠ й—®йўҳжұӮи§ЈйҡҫеәҰгҖӮеӣ жӯӨпјҢеҹәдәҺеҫ…иЈ…иҲ№еҮәеҸЈйӣҶиЈ…з®ұеңЁе Ҷеңәдёӯзҡ„дҪҚзҪ®е’ҢиЈ…иҲ№д»»еҠЎйЎәеәҸдҝЎжҒҜпјҢдҪҝз”ЁйҒ—дј з®—жі•з”ҹжҲҗеңәжЎҘи°ғеәҰж–№жЎҲпјҢе№¶ж №жҚ®е…ҲеҲ°е…ҲжңҚеҠЎи§„еҲҷз”ҹжҲҗдёҺеңәжЎҘи°ғеәҰж–№жЎҲзӣёеҜ№еә”зҡ„еҶ…йӣҶеҚЎи°ғеәҰж–№жЎҲпјҢйҡҸеҗҺдҪҝз”Ёд»ҝзңҹжЁЎеһӢеҜ№и°ғеәҰж–№жЎҲиҝӣиЎҢиҜ„дј°пјҢжңҖеҗҺйҖҡиҝҮз®—жі•иҝӯд»ЈпјҢеҜ№и°ғеәҰж–№жЎҲиҝӣиЎҢдјҳеҢ–ж”№иҝӣгҖӮз®—жі•жұӮи§ЈжөҒзЁӢи§Ғеӣҫ2гҖӮ

1.3.1жҹ“иүІдҪ“з»“жһ„
йҒ—дј з®—жі•зҡ„зӣ®зҡ„еңЁдәҺз”ҹжҲҗжҢүд»»еҠЎдјҳе…Ҳзӯүзә§йЎәеәҸжҺ’еҲ—зҡ„еңәжЎҘд»»еҠЎзј–з ҒпјҢжҹ“иүІдҪ“зј–з Ғе…ұеҲҶдёә2дёӘйғЁеҲҶпјҡеңәжЎҘеҲҶй…Қж•°зӣ®е’ҢеңәжЎҘдҪңдёҡеҢәеҹҹз®ұдҪҚж•°гҖӮжҹ“иүІдҪ“зј–з ҒзӨәдҫӢи§Ғеӣҫ3гҖӮ

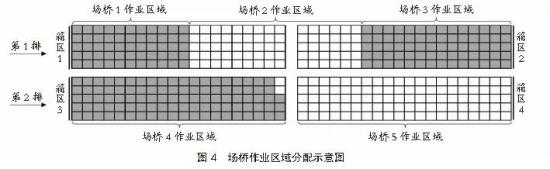
д»Ҙе®һдҫӢиҝӣиЎҢиҜҙжҳҺпјҢеңЁе®һдҫӢеңәжҷҜдёӯеҢ…еҗ«2жҺ’е…ұ4дёӘз®ұеҢәе’Ң5еҸ°еңәжЎҘпјҢеҜ№еә”зҡ„еңәжЎҘдҪңдёҡеҢәеҹҹеҲҶй…ҚзӨәж„Ҹеӣҫи§Ғеӣҫ4пјҢе…¶еҗ«д№үжҳҜ2жҺ’з®ұеҢәеҲҶеҲ«еҲҶй…Қ3еҸ°еңәжЎҘе’Ң2еҸ°еңәжЎҘиҝӣиЎҢйӣҶиЈ…з®ұиЈ…еҚёдҪңдёҡпјҢе…¶дёӯпјҡ第1жҺ’з®ұеҢәеҶ…зҡ„3еҸ°еңәжЎҘжүҖиҙҹиҙЈзҡ„дҪңдёҡеҢәеҹҹеҲҶеҲ«еҢ…еҗ«55гҖҒ75е’Ң70дёӘз®ұдҪҚпјҲеӣҫ4дёӯ第1жҺ’з®ұеҢәдёӯ3дёӘдёҚеҗҢйўңиүІеҢәеҹҹпјүпјӣ第2жҺ’з®ұеҢәеҶ…зҡ„2еҸ°еңәжЎҘжүҖиҙҹиҙЈзҡ„дҪңдёҡеҢәеҹҹеҲҶеҲ«еҢ…еҗ«97е’Ң103дёӘз®ұдҪҚпјҲеӣҫ4дёӯ第2жҺ’з®ұеҢәдёӯ2дёӘдёҚеҗҢйўңиүІеҢәеҹҹпјүгҖӮ
1.3.2еҲқе§Ӣз§ҚзҫӨз”ҹжҲҗ
еҲқд»Јжҹ“иүІдҪ“з»ҸиҝҮд»ҘдёӢ3дёӘжӯҘйӘӨз”ҹжҲҗпјҡ
-
жӯҘйӘӨ1пјҡйҡҸжңәеҲҶй…Қеҗ„жҺ’з®ұеҢәеңәжЎҘж•°зӣ®гҖӮд»ҘеҚ•жҺ’з®ұеҢәдёәеҚ•дҪҚпјҢйҡҸжңәеҲҶй…ҚеңәжЎҘж•°зӣ®пјҢ并еҲӨж–ӯеҗ„жҺ’з®ұеҢәеңәжЎҘж•°д№Ӣе·®жҳҜеҗҰи¶…иҝҮLine 1пјҢиӢҘи¶…иҝҮпјҢеҲҷйңҖеҜ№жҹ“иүІдҪ“иҝӣиЎҢж”№иҝӣж“ҚдҪң1пјҢеҚіиҜ»еҸ–еҗ„жҺ’з®ұеҢәеңәжЎҘеҲҶй…Қж•°йҮҸпјҢжҹҘжүҫеңәжЎҘеҲҶй…Қж•°йҮҸжңҖе°‘зҡ„жҹҗдёҖжҺ’з®ұеҢәAе’ҢеңәжЎҘеҲҶй…Қж•°йҮҸжңҖеӨҡзҡ„жҹҗдёҖжҺ’з®ұеҢәBпјҢ并еҲҶеҲ«е°ҶAзҡ„еңәжЎҘж•°йҮҸ+1пјҢеҗҢж—¶е°ҶBзҡ„еңәжЎҘж•°йҮҸ-1пјҢйҮҚеӨҚиҝӣиЎҢиҜҘж“ҚдҪңпјҢзӣҙиҮідёҚеҗҢжҺ’еңәжЎҘж•°йҮҸе·®ејӮеңЁйҳҲеҖјиҢғеӣҙеҶ…гҖӮ
-
жӯҘйӘӨ2пјҡйҡҸжңәеҲҶй…Қеҗ„еңәжЎҘд»»еҠЎеҢәеҹҹгҖӮж №жҚ®жүҖеҲҶй…ҚеңәжЎҘж•°пјҢдёәеҗ„еңәжЎҘйҡҸжңәеҲҶй…ҚжүҖиҙҹиҙЈзҡ„д»»еҠЎеҢәеҹҹпјҢиҜҘеҢәеҹҹз”ұз®ұдҪҚж•°йҮҸиЎЁзӨәпјҢдёҚеҗҢеңәжЎҘжүҖеҲҶй…Қд»»еҠЎеҢәеҹҹдёҚеҸ‘з”ҹйҮҚеҸ гҖӮиӢҘеңәжЎҘд»»еҠЎйҮҸеҲҶй…ҚдёҚеқҮиЎЎпјҢеҲҷдҪҝз”Ёж”№иҝӣж“ҚдҪң2пјҢеҚіжҢ‘йҖүеҮәеңЁеҗҢдёҖжҺ’з®ұеҢәжү§иЎҢиЈ…еҚёдҪңдёҡзҡ„еңәжЎҘпјҢе°Ҷе…¶дёӯд»»еҠЎйҮҸжңҖе°‘зҡ„еңәжЎҘжүҖиҙҹиҙЈз®ұдҪҚж•°+1пјҢеҗҢж—¶е°Ҷд»»еҠЎйҮҸжңҖеӨҡзҡ„еңәжЎҘжүҖиҙҹиҙЈз®ұдҪҚж•°-1пјҢж”№иҝӣж“ҚдҪң2еҗҢж ·еҸҜйҮҚеӨҚиҝӣиЎҢпјҢжҜҸз»ҸиҝҮдёҖж¬Ўж”№иҝӣж“ҚдҪң2пјҢйғҪиҰҒйҮҚж–°жЈҖжөӢжҳҜеҗҰз¬ҰеҗҲеқҮиЎЎиҰҒжұӮпјҢзӣҙиҮіз¬ҰеҗҲиҰҒжұӮгҖӮ
-
жӯҘйӘӨ3пјҡд»»еҠЎзј–з ҒжҺ’еәҸгҖӮиҜ»еҸ–жҜҸдёӘеңәжЎҘжүҖиҙҹиҙЈеҢәеҹҹеҶ…зҡ„д»»еҠЎдҝЎжҒҜпјҢ并е°Ҷд»»еҠЎзј–еҸ·жҢүз…§д»»еҠЎзӯүзә§йЎәеәҸиҝӣиЎҢжҺ’еҲ—гҖӮ
1.3.3еҶ…йӣҶеҚЎи°ғеәҰ
еҹәдәҺ第1йҳ¶ж®өеҫ—еҲ°зҡ„еңәжЎҘи°ғеәҰж–№жЎҲпјҢйҮҮз”Ё“е…ҲеҲ°е…ҲжңҚеҠЎ”规еҲҷз”ҹжҲҗеҶ…йӣҶеҚЎи°ғеәҰж–№жЎҲпјҢеҚіеҪ“еңәжЎҘйңҖжү§иЎҢеҸ–з®ұж“ҚдҪңж—¶пјҢйҰ–е…ҲеҲӨж–ӯжҳҜеҗҰжңүз©әй—ІеҶ…йӣҶеҚЎпјҡиӢҘжңүпјҢеҲҷйҖүжӢ©жңҖе…ҲеҲ°иҫҫе Ҷеңәдё”еӨ„дәҺз©әй—ІзҠ¶жҖҒзҡ„еҶ…йӣҶеҚЎиҝӣиЎҢдёӢдёҖдёӘиЈ…иҲ№дҪңдёҡд»»еҠЎпјӣиӢҘж— пјҢеҲҷзӯүеҫ…иҮіжңүз©әй—ІеҶ…йӣҶеҚЎдёәжӯўгҖӮ
1.3.4йҖӮеә”еәҰеҖји®Ўз®—
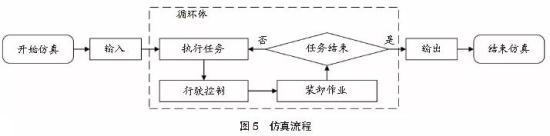
ж №жҚ®еңәжЎҘе’ҢйӣҶеҚЎе®һйҷ…дҪңдёҡиҝҮзЁӢпјҢе»әз«Ӣж—¶й—ҙй©ұеҠЁд»ҝзңҹжЁЎеһӢпјҢд»ҝзңҹжөҒзЁӢи§Ғеӣҫ5гҖӮйҰ–е…ҲпјҢиҫ“е…Ҙд»ҝзңҹзҺҜеўғеҸӮж•°пјҢдҫӢеҰӮе Ҷеңәе’Ңз®ұеҢәе°әеҜёгҖҒи®ҫеӨҮдҪңдёҡеҸӮж•°гҖҒйӣҶиЈ…з®ұе ҶеӯҳдҪҚзҪ®е’Ңд»»еҠЎдҝЎжҒҜзӯүпјҢд»ҺиҖҢз”ҹжҲҗд»ҝзңҹеңәжҷҜгҖӮе…¶ж¬ЎпјҢжҢүз…§еңәжЎҘе’ҢйӣҶеҚЎзҡ„дҪңдёҡж–№жЎҲдёәеңәжЎҘе’ҢйӣҶеҚЎеҲҶй…ҚдҪңдёҡд»»еҠЎпјҢиҝҮзЁӢдёӯдёҚж–ӯжӣҙж–°и®ҫеӨҮдҪҚзҪ®гҖҒиЈ…еҚёдҪңдёҡиҝҮзЁӢе’ҢйӣҶиЈ…з®ұдҝЎжҒҜпјҢзӣҙеҲ°жүҖжңүи®ҫеӨҮе®ҢжҲҗ规е®ҡзҡ„йӣҶиЈ…з®ұиЈ…еҚёдҪңдёҡгҖӮжңҖеҗҺпјҢи®°еҪ•жүҖжңүйӣҶиЈ…з®ұиЈ…еҚёдҪңдёҡе®ҢжҲҗзҡ„ж—¶й—ҙпјҢ并иҫ“еҮәжңҖеҗҺ1дёӘйӣҶиЈ…з®ұе®ҢжҲҗиЈ…иҲ№дҪңдёҡзҡ„ж—¶й—ҙпјҢдҪңдёәжүҖжңүд»»еҠЎжҖ»зҡ„е®ҢжҲҗж—¶й—ҙгҖӮ
1.3.5йҒ—дј ж“ҚдҪң
йҒ—дј ж“ҚдҪңз”ЁдәҺз”ҹжҲҗж–°зҡ„еӯҗд»Јжҹ“иүІдҪ“гҖӮйҰ–е…ҲпјҢд»ҺзҲ¶д»Јжҹ“иүІдҪ“дёӯйҡҸжңәйҖүжӢ©2жқЎжҹ“иүІдҪ“гҖӮе…¶ж¬ЎпјҢжҢүз…§дёҖе®ҡжҰӮзҺҮиҝӣиЎҢжҹ“иүІдҪ“дәӨеҸүж“ҚдҪңпјҢеҚіеңЁ2жқЎжҹ“иүІдҪ“дёӯйҡҸжңәйҖүжӢ©зӣёеҗҢй•ҝеәҰжҹ“иүІдҪ“зүҮж®өиҝӣиЎҢдәӨжҚўгҖӮз”ұдәҺдәӨеҸүж“ҚдҪңдјҡж”№еҸҳеңәжЎҘзҡ„дҪңдёҡеҢәеҹҹз®ұдҪҚж•°пјҢиҝӣиҖҢеҪұе“ҚеңәжЎҘзҡ„дҪңдёҡйҮҸеҲҶй…Қз»“жһңпјҢдёәзЎ®дҝқдәӨеҸүж“ҚдҪңжүҖз”ҹжҲҗжҹ“иүІдҪ“д»Қз¬ҰеҗҲеқҮиЎЎиҰҒжұӮпјҢеҜ№дёҚз¬ҰеҗҲеқҮиЎЎиҰҒжұӮзҡ„жҹ“иүІдҪ“иҝӣиЎҢж”№иҝӣж“ҚдҪң2гҖӮжңҖеҗҺпјҢд»ҘдёҖе®ҡжҰӮзҺҮиҝӣиЎҢжҹ“иүІдҪ“еҸҳејӮж“ҚдҪңпјҢеҚідёәдҝқиҜҒз»ҸеҸҳејӮж“ҚдҪңз”ҹжҲҗзҡ„жҹ“иүІдҪ“з¬ҰеҗҲеқҮиЎЎиҰҒжұӮпјҢйЎ»йҮҚеӨҚеҲқе§Ӣз§ҚзҫӨзҡ„з”ҹжҲҗиҝҮзЁӢгҖӮ
2
е®һдҫӢйӘҢиҜҒ
дёәдәҶйӘҢиҜҒи°ғеәҰж–№жі•зҡ„жңүж•ҲжҖ§е’Ңе…ҲиҝӣжҖ§пјҢеҲҶеҲ«еңЁеҚ•з®ұеҢәе’ҢеӨҡз®ұеҢәеңәжҷҜдёӢпјҢиҝҗз”Ёжң¬ж–ҮжүҖжҸҗеҮәзҡ„дёӨйҳ¶ж®өз®—жі•еҜ№й—®йўҳиҝӣиЎҢжұӮи§ЈпјҢеҗҢж—¶дёҺдј з»ҹзҡ„еҸҢеұӮйҒ—дј з®—жі•пјҲMulti-layer Genetic AlgorithmпјҢMLGAпјүиҝӣиЎҢеҜ№жҜ”гҖӮMLGAзҡ„дёҠеұӮйҒ—дј з®—жі•з”ЁдәҺз”ҹжҲҗеңәжЎҘи°ғеәҰж–№жЎҲпјҢе…¶иҝҮзЁӢдёҺжң¬ж–ҮжүҖз”ЁйҒ—дј з®—жі•зӣёеҗҢгҖӮMLGAзҡ„дёӢеұӮйҒ—дј з®—жі•з”ЁдәҺз”ҹжҲҗйӣҶеҚЎи°ғеәҰж–№жЎҲпјҢе…¶иҝҮзЁӢеҸӮиҖғж–ҮзҢ®10жүҖз”ЁMLGAзҡ„дёӢеұӮйҒ—дј з®—жі•пјҢжүҖз”ҹжҲҗзҡ„и°ғеәҰж–№жЎҲдҪҝз”Ёжң¬ж–Үзҡ„йҖӮеә”еәҰеҖји®Ўз®—ж–№жі•иҝӣиЎҢд»ҝзңҹиҜ„дј°гҖӮз®—жі•йҮҮз”ЁMATLAB 2012bиҝӣиЎҢзј–иҜ‘гҖӮ
2.1еҚ•з®ұеҢәиҜ•йӘҢ
2.1.1иҜ•йӘҢи®ҫзҪ®
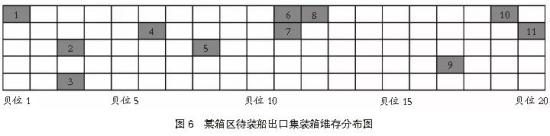
еҹәдәҺз ҒеӨҙи®ҫеӨҮе®һйҷ…дҪңдёҡиҝҮзЁӢпјҢи®ҫзҪ®зӣёе…ід»ҝзңҹеҸӮж•°пјҢеҒҮи®ҫеңәжЎҘе’ҢеІёжЎҘиЈ…еҚё1дёӘйӣҶиЈ…з®ұзҡ„ж—¶й—ҙеҲҶеҲ«дёә120 sе’Ң90 sпјҢйӣҶеҚЎйҖҹеәҰдёә5 m/sгҖӮжҹҗз®ұеҢәеҫ…иЈ…иҲ№еҮәеҸЈйӣҶиЈ…з®ұе ҶеӯҳеҲҶеёғеӣҫи§Ғеӣҫ6пјҢе…¶дёӯзҒ°иүІж–№ж јдёәеҫ…иЈ…иҲ№з®ұжүҖеңЁдҪҚзҪ®гҖӮжүҖз”Ёз®—дҫӢдёӯеҢ…еҗ«2еҸ°еңәжЎҘгҖҒ4иҫҶеҶ…йӣҶеҚЎе’Ң11дёӘеҫ…иЈ…иҲ№йӣҶиЈ…з®ұпјҢжүҖжңүйӣҶиЈ…з®ұеұһдәҺеҗҢдёҖд»»еҠЎз»„пјҢеӣ жӯӨеҸҜд»ҘжҢүд»»ж„ҸйЎәеәҸиЈ…иҲ№гҖӮ
MLGAеӣ йҡҸжңәжҖ§иҫғејәиҖҢйҡҫд»ҘеңЁиҫғе°‘иҝӯд»Јж¬Ўж•°еҶ…еҫ—еҮәиҫғдјҳз»“жһңпјҢеӣ жӯӨе°Ҷе…¶иҝӯд»Јж¬Ўж•°и®ҫзҪ®дёә50 000ж¬ЎпјҢиҖҢжң¬ж–Үз®—жі•зҡ„иҝӯд»Јж¬Ўж•°и®ҫзҪ®дёә500ж¬ЎгҖӮз”ұдәҺиҜҘз®—дҫӢд»…ж¶үеҸҠеҚ•дёӘз®ұеҢәпјҢеӣ иҖҢжӯӨж—¶еҸӮж•°Line 1еӨұж•ҲпјҢжӯӨеӨ„е°ҶеҸӮж•°Line 2еҲҶеҲ«еҸ–еҖј1гҖҒ3гҖҒ5иҝӣиЎҢиҜ•йӘҢпјҢд»ҘжҺўз©¶еҸӮж•°Line 2еҜ№з®—жі•жҖ§иғҪзҡ„еҪұе“ҚгҖӮ
2.1.2дјҳеҢ–з»“жһңеҜ№жҜ”
MLGAе’Ңжң¬ж–Үз®—жі•зҡ„дёҚеҗҢеҸӮж•°жұӮи§Јз»“жһңж•ЈзӮ№еҜ№жҜ”еӣҫи§Ғеӣҫ7гҖӮMLGAжүҖеҫ—з»“жһңзҰ»ж•ЈзЁӢеәҰејәпјҢ收ж•ӣйҖҹеәҰж…ўпјҢжңҖдјҳи§Јзҡ„зӣ®ж ҮеҖјд»Қй«ҳдәҺ800пјҢиҖҢжң¬ж–Үз®—жі•жүҖеҫ—з»“жһңжҳҺжҳҫйӣҶдёӯзЁӢеәҰй«ҳпјҢеӣ иҖҢ算法收ж•ӣйҖҹеәҰеҝ«пјҢдё”з»“жһңеӨ§йҮҸйӣҶдёӯдәҺжңҖдјҳи§ЈгҖӮеўһеӨ§Line 2еҗҺпјҢз®—жі•и¶Ҡйҡҫ收ж•ӣиҮіжңҖдјҳи§ЈпјҢе…¶еҺҹеӣ жҳҜиҜҘз®—дҫӢдёӯйӣҶиЈ…з®ұеңЁз®ұеҢәдёӯеқҮеҢҖеҲҶеёғпјҢеқҮиЎЎеҲҶй…ҚеңәжЎҘд»»еҠЎеҚіеҸҜжңҖе°ҸеҢ–жҖ»иЈ…иҲ№дҪңдёҡж—¶й—ҙпјҢеӣ жӯӨеҸӮж•°Line 2еҸ–еҖји¶Ҡе°ҸпјҢеҲҷеңәжЎҘд»»еҠЎйҮҸе·®ејӮи¶Ҡе°ҸпјҢд»ҺиҖҢзј©еҮҸз®—жі•жҗңзҙўж—¶й—ҙпјҢжҸҗеҚҮ算法收ж•ӣйҖҹеәҰгҖӮ
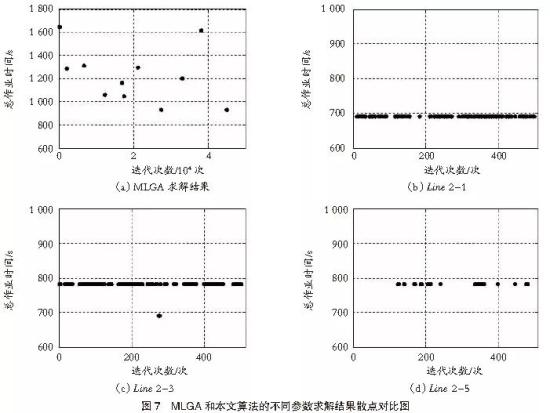
з»јдёҠеҸҜзҹҘпјҢжң¬ж–ҮжүҖжҸҗеҮәзҡ„и°ғеәҰж–№жі•е’ҢжұӮи§Јз®—жі•еңЁеҚ•з®ұеҢәи°ғеәҰдјҳеҢ–ж–№йқўе…·жңүжңүж•ҲжҖ§е’Ңе…ҲиҝӣжҖ§гҖӮ
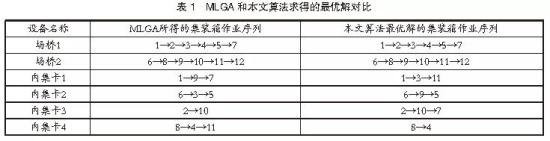
MLGAе’Ңжң¬ж–Үз®—жі•жұӮеҫ—зҡ„жңҖдјҳи§ЈеҜ№жҜ”и§ҒиЎЁ1пјҢдёӨз®—жі•жүҖеҫ—жңҖдјҳи§Је…·жңүе·®ејӮпјҢеҗҢж—¶жҖ»дҪңдёҡе®ҢжҲҗж—¶й—ҙз”ұMLGAзҡ„703 sеҮҸе°‘дёә693 sпјҢеҸҜи§Ғжң¬ж–ҮжүҖжҸҗеҮәз®—жі•иғҪеӨҹжңүж•ҲжҸҗеҚҮз®—жі•дјҳеҢ–ж•ҲжһңгҖӮ
2.2еӨҡз®ұеҢәи°ғеәҰиҜ•йӘҢ
дёәиҝӣдёҖжӯҘйӘҢиҜҒи°ғеәҰж–№жі•еңЁеӨҡз®ұеҢәеңәжҷҜдёӢзҡ„жңүж•ҲжҖ§е’Ңе…ҲиҝӣжҖ§пјҢиҝӣиЎҢеӨҡз®ұеҢәе®һдҫӢиҜ•йӘҢгҖӮ
2.2.1иҜ•йӘҢи®ҫзҪ®
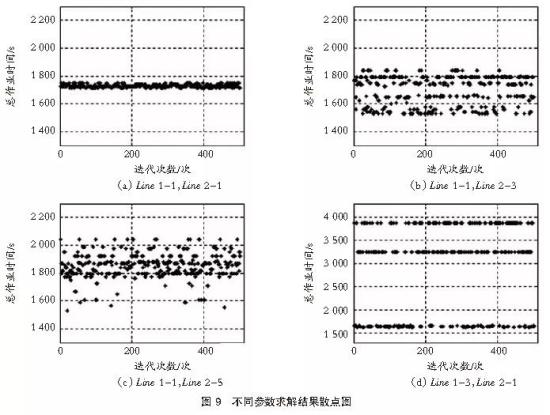
еҒҮи®ҫзҡ„иЈ…иҲ№дҪңдёҡйӣҶиЈ…з®ұеҲҶеёғеңәжҷҜи§Ғеӣҫ8пјҢе…ұ40дёӘеҫ…иЈ…иҲ№еҮәеҸЈйӣҶиЈ…з®ұйҡҸжңәеҲҶеёғеңЁ2жҺ’е…ұ4дёӘз®ұеҢәдёӯгҖӮ
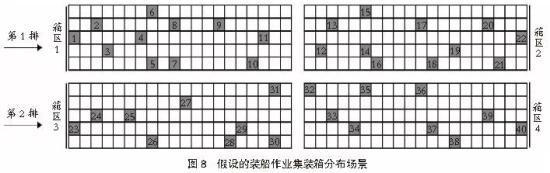
еҒҮи®ҫе…ұжңү5дёӘйӣҶиЈ…з®ұиЈ…иҲ№дҪңдёҡд»»еҠЎпјҢи§ҒиЎЁ2гҖӮеңәжЎҘйңҖжҢүз…§д»»еҠЎзј–еҸ·йЎәеәҸиҝӣиЎҢиЈ…иҲ№дҪңдёҡпјҢеҚіжҜҸеҸ°еңәжЎҘйңҖеңЁе®ҢжҲҗжүҖеҲҶй…ҚеҢәеҹҹеҶ…зҡ„д»»еҠЎ1зҡ„йӣҶиЈ…з®ұиЈ…иҲ№дҪңдёҡеҗҺпјҢжүҚиғҪејҖе§Ӣжү§иЎҢд»»еҠЎ2зҡ„йӣҶиЈ…з®ұиЈ…иҲ№дҪңдёҡпјҢе…¶д»–д»»еҠЎд»ҘжӯӨзұ»жҺЁгҖӮе…ұжңү5еҸ°еңәжЎҘгҖҒ8иҫҶеҶ…йӣҶеҚЎеҸӮдёҺиЈ…иҲ№дҪңдёҡгҖӮдёәи§ӮеҜҹеҸӮж•°Line 1е’ҢеҸӮж•°Line 2еҜ№з®—жі•и°ғеәҰдјҳеҢ–з»“жһңзҡ„еҪұе“ҚпјҢеҲҶеҲ«и®ҫзҪ®4дёӘдёҚеҗҢLine 1е’ҢLin 2еҸӮж•°еҖјеҜ№пјҢеҚіеҲҶеҲ«еҸ–[1пјҢ1]гҖҒ[1пјҢ3]гҖҒ[1пјҢ5]е’Ң[3пјҢ1]еҜ№з®—дҫӢиҝӣиЎҢжұӮи§ЈпјҢз®—жі•з»Ҳжӯўиҝӯд»Јж¬Ўж•°еқҮи®ҫзҪ®дёә500ж¬ЎгҖӮ
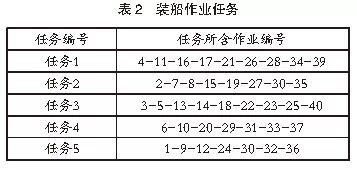
2.2.2з®—жі•з»“жһңеҜ№жҜ”еҲҶжһҗ
дёҚеҗҢеҸӮж•°жұӮи§Јз»“жһңж•ЈзӮ№еӣҫи§Ғеӣҫ9гҖӮдёҚеҗҢдәҺеҚ•з®ұеҢәиҜ•йӘҢз»“жһңпјҢеҪ“еҸӮж•°Line 1е’ҢLine 2еҸ–еҖјжңҖе°Ҹж—¶пјҢе…¶жңҖдјҳи§Јжҳҫ然еҠЈдәҺеҸӮж•°Line 1е’ҢLine 2е…¶д»–еҸ–еҖјжүҖеҫ—з»“жһңпјҢе…¶еҺҹеӣ жҳҜиҜҘеңәжҷҜиҫғдёәеӨҚжқӮпјҢеңЁиҖғиҷ‘дёҚеҗҢдҪңдёҡдјҳе…ҲйЎәеәҸзҡ„жғ…еҶөдёӢпјҢеқҮиЎЎдёҚеҗҢеңәжЎҘеҗ„ж—¶ж®өдҪңдёҡйҮҸпјҢеҸҜиғҪеҮәзҺ°йғЁеҲҶеңәжЎҘзӯүеҫ…е…¶д»–еңәжЎҘе®ҢжҲҗдјҳе…Ҳд»»еҠЎзҡ„жғ…еҶөгҖӮеўһеӨ§еҸӮж•°Line 2еҸ–еҖјеҗҺеҫ—еҲ°зҡ„и§Је…·жңүжӣҙејәзҡ„еӨҡж ·жҖ§пјҢеӣ жӯӨиғҪеӨҹеҫ—еҲ°жӣҙеҘҪзҡ„жңҖдјҳи§ЈгҖӮ然иҖҢпјҢеҸҜиЎҢи§ЈеўһеҠ дјҡеҜјиҮҙз®—жі•жҗңзҙўиҢғеӣҙжү©еӨ§пјҢиҝӣиҖҢеҜјиҮҙ算法收ж•ӣйҖҹеәҰйҷҚдҪҺпјҢеӣ жӯӨжҹ“иүІдҪ“зӣ®ж ҮеҖјзҰ»ж•ЈеәҰжңҖй«ҳгҖӮеўһеӨ§еҸӮж•°Line 1еҸ–еҖјеҗҢж ·иғҪеӨҹеҫ—еҲ°жӣҙеӨҡеҸҜиЎҢи§ЈгҖӮз»јдёҠеҸҜзҹҘпјҢеҸӮж•°Line 1е’ҢLine 2еҸ–еҖји¶Ҡе°ҸпјҢеҲҷ算法收ж•ӣйҖҹеәҰи¶Ҡеҝ«пјҢдҪҶе…¶еҸҜиЎҢи§ЈжңүйҷҗпјҢеӣ жӯӨеә”йҖӮеҪ“еўһеӨ§еҸӮж•°Line 1е’ҢLine 2зҡ„еҸ–еҖјгҖӮ
3
з»“и®ә
жң¬ж–Үз ”з©¶дәҶеёҰд»»еҠЎйЎәеәҸзәҰжқҹзҡ„еңәжЎҘе’ҢеҶ…йӣҶеҚЎиҒ”еҗҲи°ғеәҰдјҳеҢ–й—®йўҳгҖӮйҰ–е…ҲпјҢеҹәдәҺеңәжЎҘе’ҢеҶ…йӣҶеҚЎзҡ„е®һйҷ…дҪңдёҡиҝҮзЁӢпјҢиҖғиҷ‘еңәжЎҘе’ҢеҶ…йӣҶеҚЎдҪңдёҡзәҰжқҹгҖҒеңәжЎҘдҪңдёҡйҮҸеқҮиЎЎеҲҶй…ҚзӯүпјҢжҸҗеҮәдёҚеқҮиЎЎйҳҲеҖјеҸӮж•°пјҢ并жҸҗеҮәдёӨйҳ¶ж®өи°ғеәҰж–№жі•гҖӮйҡҸеҗҺпјҢиҖғиҷ‘и°ғеәҰиҝҮзЁӢзҡ„еӨҚжқӮжҖ§пјҢдҪҝз”ЁйҒ—дј з®—жі•еҜ№й—®йўҳиҝӣиЎҢжұӮи§ЈпјҢ并жҸҗеҮә2з§Қж”№иҝӣж“ҚдҪңпјҢд»ҘжҸҗеҚҮз®—жі•жұӮи§Јж•ҲзҺҮпјҢеҗҢж—¶иҖғиҷ‘еҶ…йӣҶеҚЎдҪңдёҡиҝҮзЁӢдёҺеңәжЎҘдҪңдёҡиҝҮзЁӢзҡ„иҖҰеҗҲжҖ§пјҢдҪҝз”ЁеҗҜеҸ‘ејҸ规еҲҷеҜ№еҶ…йӣҶеҚЎиҝӣиЎҢи°ғеәҰгҖӮжңҖеҗҺпјҢйҖҡиҝҮз®—дҫӢйӘҢиҜҒжң¬ж–ҮжүҖжҸҗеҮәзҡ„и°ғеәҰж–№жі•е’ҢжұӮи§Јз®—жі•еңЁеҚ•з®ұеҢәе’ҢеӨҡз®ұеҢәи°ғеәҰиҝҮзЁӢдёӯеқҮе…·жңүиҫғејәзҡ„жңүж•ҲжҖ§е’Ңе…ҲиҝӣжҖ§пјҢиғҪеӨҹжҸҗй«ҳеңәжЎҘе’ҢеҶ…йӣҶеҚЎдҪңдёҡж•ҲзҺҮпјҢеҮҸе°‘иҲ№иҲ¶еңЁжёҜйқ жіҠж—¶й—ҙгҖӮ

















