



дёүдёҖжҷәзҹҝ科жҠҖжңүйҷҗе…¬еҸёз§үжүҝ“е“ҒиҙЁж”№еҸҳдё–з•Ң”зҡ„дҪҝе‘ҪпјҢиҮҙеҠӣдәҺжү“йҖ дёҖеҘ—е®Ңж•ҙзҡ„жҷәж…§зҹҝеұұиҝҗиҗҘз®ЎзҗҶзі»з»ҹгҖӮ
дҪңдёә“жҷәж…§зҹҝеұұ”дёӯзҡ„дёҖе‘ҳпјҡз”ұйңІеӨ©зҹҝеұұжҷәиғҪеҢ–з ”з©¶жүҖе’Ңзі»з»ҹиҪҜ件жүҖиҮӘдё»з ”еҸ‘зҡ„ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰпјҢзӣ®еүҚе·Із»ҸеңЁжөҷжұҹзңҒж№–е·һеёӮдёүдёҖе·ҘзЁӢжңәжў°иҜ•йӘҢжЈҖжөӢжңүйҷҗе…¬еҸёзҡ„иҜ•йӘҢеңәеҶ…иҝҗиЎҢдәҶ2000kmгҖӮ
иҜҘж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰжӢҘжңүзҺҜеўғж„ҹзҹҘгҖҒе®ҡдҪҚеҜјиҲӘгҖҒиҪЁиҝ№и§„еҲ’гҖҒеҶізӯ–жҺ§еҲ¶гҖҒ5GиҪҰиҒ”зҪ‘гҖҒзәҝжҺ§еә•зӣҳгҖҒж•…йҡңиҜҠж–ӯгҖҒйҒҘжҺ§й©ҫ驶зӯүе…ій”®жҠҖжңҜпјҢе®һзҺ°L4зә§ж— дәәй©ҫ驶иҪҰиҫҶзҡ„ејҖеҸ‘гҖӮ

ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰ
01
й«ҳзІҫе®ҡдҪҚеҜјиҲӘ

RTKеҹәз«ҷ-еҸҢеӨ©зәҝGPSжҺҘ收жңәи®ҫеӨҮ
е®ҡдҪҚеҜјиҲӘжҠҖжңҜе°ҶиҮӘиә«дҪңдёәиҙЁзӮ№дёҺе‘ЁеӣҙзҺҜеўғжңүжңәз»“еҗҲпјҢеҮҶзЎ®ж„ҹзҹҘиҪҰиҫҶеңЁе…ЁеұҖзҺҜеўғдёӯзҡ„зӣёеҜ№дҪҚзҪ®пјҢеё®еҠ©иҪҰиҫҶеҮҶзЎ®иҺ·еҫ—иҮӘиә«йҖҹеәҰгҖҒдҪҚзҪ®гҖҒж–№еҗ‘гҖҒи·Ҝеҫ„зӯүдҝЎжҒҜгҖӮж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰй…ҚзҪ®жңүRTKеҹәз«ҷ-еҸҢеӨ©зәҝGPSжҺҘ收жңәи®ҫеӨҮпјҢеҲ©з”Ёе·®еҲҶз®—жі•е·Із»Ҹе®һзҺ°дәҶж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰзҡ„еҺҳзұізә§е®ҡдҪҚгҖӮ
02
еӨҡиһҚеҗҲзҺҜеўғж„ҹзҹҘ

жҝҖе…үйӣ·иҫҫжЈҖжөӢйҡңзўҚзү©ж•Ҳжһңеӣҫ
ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰзҡ„ж„ҹзҹҘеҠҹиғҪдё»иҰҒйҖҡиҝҮдј ж„ҹеҷЁжқҘиҺ·еҸ–зӣёеә”ж•°жҚ®пјҢдј ж„ҹеҷЁзӣёеҪ“дәҺиҪҰиҫҶзҡ„“зңјзқӣ”пјҢз”ЁдәҺе®һж—¶и§ӮеҜҹиҪҰиҫҶе‘ЁеӣҙеӨҚжқӮзҡ„еҠЁжҖҒзҺҜеўғпјҢжҳҜж— дәәй©ҫ驶дёҚеҸҜжҲ–зјәзҡ„йҮҚиҰҒз»„жҲҗйғЁеҲҶд№ӢдёҖгҖӮ
ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰзҡ„дј ж„ҹеҷЁеҢ…жӢ¬жңүжҝҖе…үйӣ·иҫҫгҖҒжҜ«зұіжіўйӣ·иҫҫгҖҒзҪ‘з»ңж‘„еғҸеӨҙгҖҒи¶…еЈ°жіўйӣ·иҫҫгҖҒGPSгҖҒжғҜжҖ§еҜјиҲӘзӯүгҖӮе…¶дёӯжҝҖе…үйӣ·иҫҫгҖҒжҜ«зұіжіўйӣ·иҫҫгҖҒзҪ‘з»ңж‘„еғҸеӨҙе’Ңи¶…еЈ°жіўйӣ·иҫҫйҖҡиҝҮеӨҡдј ж„ҹеҷЁиһҚеҗҲ算法并结еҗҲиҮӘиә«зҡ„дј ж„ҹеҷЁдјҳеҠҝе®ҢжҲҗеҜ№е‘ЁеӣҙзҺҜеўғзҡ„ж„ҹзҹҘгҖӮ
еңЁж„ҹзҹҘжөӢиҜ•дёӯпјҢиЎҢдәәжЈҖжөӢжҳҜ0.2m-60mзҡ„иҢғеӣҙпјҢиҪҰиҫҶжЈҖжөӢжҳҜ0-80mзҡ„иҢғеӣҙпјҢйҡңзўҚзү©жЈҖжөӢжҳҜ0-80mзҡ„иҢғеӣҙпјҢжҢЎеңҹеўҷжЈҖжөӢжҳҜ0-9mзҡ„иҢғеӣҙгҖӮ
03
иҮӘйҖӮеә”иҪЁиҝ№и§„еҲ’
иҪЁиҝ№и§„еҲ’жҠҖжңҜдёәж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰжҸҗдҫӣжңҖдјҳзҡ„иЎҢиҪҰи·Ҝеҫ„гҖӮдёҺе…ій”®дҪҚзҪ®е®үиЈ…зҡ„RSUе’ҢиҪҰиҫҶдёҠзҡ„OBUе®ҢжҲҗиҪҰиҫҶзҡ„V2Xзҡ„еҚҸеҗҢдҪңдёҡпјҢжҸҗй«ҳж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰзҡ„иҝҗиҫ“ж•ҲзҺҮгҖӮиҮӘеҚёиҪҰдҪҝз”ЁA*з®—жі•иҝӣиЎҢжңҖдјҳи·Ҝеҫ„жҗңзҙўеҠҹиғҪпјҢ规еҲ’дҪҝз”ЁиҙқеЎһе°”жӣІзәҝпјҢе®һзҺ°иҮӘ主规еҲ’еҜ»дјҳеҠҹиғҪпјҢе®ҢжҲҗйҒҝйҡңз»•иЎҢеҠҹиғҪгҖӮ
04
жҷәиғҪеҶізӯ–жҺ§еҲ¶
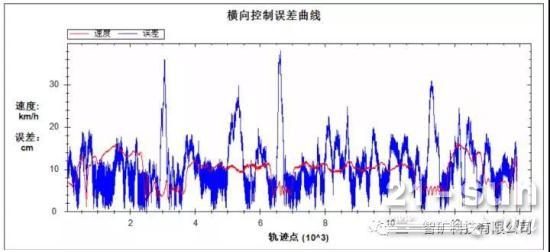
жЁӘеҗ‘жҺ§еҲ¶иҜҜе·®жӣІзәҝ

е®ҡзӮ№дёҫеҚҮиҙ§з®ұ
еңЁдёҚеҗҢзҡ„еңәжҷҜдёӢиҪҰиҫҶдјҡеҸҚеә”еҮәдёҚеҗҢзҡ„еҶізӯ–е’ҢжҺ§еҲ¶зӯ–з•ҘпјҢз»“еҗҲж–Ҫе·Ҙдәәе‘ҳPadеҜ№ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰдёӢеҸ‘зҡ„жҢҮд»ӨпјҢиҪҰиҫҶеңЁдёҚеҗҢеңәжҷҜдёӢеҒҡеҮәдёҚеҗҢзҡ„еҠЁдҪңгҖӮ
еңЁеҫӘиҝ№жҺ§еҲ¶дёӯдҪҝз”Ёжҗӯе»әзҡ„е®ҪдҪ“иҮӘеҚёиҪҰзҡ„иҝҗеҠЁеӯҰжЁЎеһӢдҪңдёәеүҚйҰҲжҺ§еҲ¶пјҢд»ҘPIDжҺ§еҲ¶з®—жі•дҪңдёәеҸҚйҰҲжҺ§еҲ¶пјҢдёӨиҖ…з»“еҗҲеҸҜж»Ўи¶ізӣҙйҒ“и·қзҰ»иҜҜе·®еңЁ20cmд№ӢеҶ…пјҢејҜйҒ“и·қзҰ»иҜҜе·®еңЁ40cmд№ӢеҶ…зҡ„жҺ§еҲ¶иҰҒжұӮгҖӮеңЁиЈ…ж–ҷзӮ№е’ҢеҚёж–ҷзӮ№е®һзҺ°е®ҡзӮ№дёҫеҚҮиҙ§з®ұе’ҢиҮӘеҠЁдёӢйҷҚиҙ§з®ұзӯүжҺ§еҲ¶еҠҹиғҪгҖӮ
05
5Gе·Ҙдёҡдә’иҒ”

з”ұзі»з»ҹиҪҜ件жүҖејҖеҸ‘зҡ„ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰзҡ„и°ғеәҰе№іеҸ°йӣҶжҲҗдәҶж— дәәжңәйҮҮйӣҶзҡ„й«ҳзІҫең°еӣҫгҖҒе·ҘдҪңж—¶зҡ„дҪңдёҡиҰҒжұӮгҖҒиҮӘеҚёиҪҰзҡ„зҠ¶жҖҒжҳҫзӨәгҖҒж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰзҡ„йӣҶзҫӨи°ғеәҰзӯүеҠҹиғҪпјҢйҮҮз”Ёе·Ҙдёҡ5G CPEдҪңдёәйҖҡи®ҜиЈ…зҪ®пјҢдҪҝз”Ё5GйҖҡи®ҜжҠҖжңҜзҡ„延иҝҹдҝқиҜҒеңЁ100msд№ӢеҶ…е®һзҺ°иҪҰз«ҜдёҺдә‘з«Ҝзҡ„дәәжңәдәӨдә’еҠҹиғҪгҖӮй…ҚеҗҲдҪҺ延иҝҹзҡ„5GйҖҡи®ҜпјҢйңІеӨ©зҹҝеұұжҷәиғҪеҢ–з ”з©¶жүҖиҮӘдё»з ”еҸ‘дәҶйҒҘжҺ§й©ҫ驶еҠҹиғҪпјҢеҸҜд»ҘеңЁд»»дҪ•еңәжҷҜдёӢжҺҘз®Ўж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰпјҢе®һзҺ°ж— дәәй©ҫ驶дёҺйҒҘжҺ§й©ҫ驶зҡ„е®ҢзҫҺз»“еҗҲгҖӮе…¶дёўеҢ…зҺҮдёә0.045%пјҢе№іеқҮ延иҝҹж—¶й—ҙдёә10msгҖӮ
06
ж•…йҡңиҜҠж–ӯ

и®ҫеӨҮеҒҘеә·зӣ‘жҺ§еӨ§еұҸ
ж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰй…ҚеӨҮдәҶжҷәиғҪж•…йҡңиҜҠж–ӯзі»з»ҹпјҢеңЁиҪҰиҫҶдёҠе®үиЈ…T-Boxе®һж—¶ж•°жҚ®йҮҮйӣҶдёҠдј еҲ°дә‘з«ҜпјҢйҮҮз”ЁеӨ§ж•°жҚ®е®һж—¶еҒҘеә·еҲҶжһҗе®һж—¶еҜ№иҪҰиҫҶиҝӣиЎҢж•…йҡңиҜҠж–ӯпјҢеҮҶзЎ®еҝ«жҚ·жҺ’жҹҘж•…йҡңгҖҒжҸҗеҚҮиҪҰиҫҶз»ҙжҠӨж•ҲзҺҮе’Ңеұ•зӨәе…Ёйқўзҡ„и®ҫеӨҮдҝЎжҒҜгҖӮ
дёүдёҖжҷәзҹҝ科жҠҖжңүйҷҗе…¬еҸёдҫқжүҳдәҺ“жҷәж…§зҹҝеұұ”иғҢжҷҜдёӢз ”еҸ‘еҮәдәҶ第дёҖд»Јж— дәәй©ҫ驶зәҜз”өеҠЁе®ҪдҪ“иҮӘеҚёиҪҰпјҢе·Іе……еҲҶжҺҢжҸЎж— дәәй©ҫ驶ж„ҹзҹҘгҖҒ规еҲ’гҖҒеҶізӯ–гҖҒжҺ§еҲ¶гҖҒзҪ‘иҒ”гҖҒиҜҠж–ӯзӯүе…ій”®жҠҖжңҜпјҢе°Ҷй’ҲеҜ№иӢҘе№ІдјҳеҠҝйўҶеҹҹ继з»ӯжҺЁеҮәдёҖзі»еҲ—жңүеӣҪйҷ…з«һдәүеҠӣзҡ„“жҷәж…§зҹҝеұұ”дә§е“ҒгҖӮ





















