



0 еј•иЁҖеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„дҪңдёәдёҖз§Қж–°еһӢзҡ„дј еҠЁзі»з»ҹпјҢе·Із»Ҹиў«еә”з”ЁеңЁеӨ©жҙҘжёҜгҖҒдёҠжө·жёҜзӯүжёҜеҸЈиө·йҮҚжңәзҡ„еҮҸйҖҹеҷЁдј еҠЁзі»з»ҹи®ҫи®ЎдёӯпјҢе®ғе…·жңүдј еҠЁжҜ”еӨ§гҖҒдј еҠЁе№ізЁігҖҒй«ҳжүҝиҪҪгҖҒй«ҳж•ҲзҺҮзӯүдјҳзӮ№пјҢеә”з”ЁеүҚжҷҜе№ҝйҳ”гҖӮ
еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„жҳҜдёҖз§ҚйҖҡиҝҮеңЁеңҶжҹұеҮёиҪ®е’Ңд»ҺеҠЁзӣҳй—ҙеҠ е…ҘеңҶжҹұж»ҡеӯҗдёӯй—ҙдҪ“пјҢд»ҺиҖҢе®һзҺ°д»Ҙж»ҡд»Јж»‘зҡ„ж–°еһӢеҮҸйҖҹжңәжһ„пјҢе…¶жңәжһ„еҪўејҸеҰӮеӣҫ1 жүҖзӨәгҖӮзӣ®еүҚпјҢе…ідәҺиҜҘжңәжһ„зҡ„з ”з©¶дё»иҰҒйӣҶдёӯдәҺз»“жһ„и®ҫи®ЎгҖҒжҺҘи§Ұзү№жҖ§д»ҘеҸҠе»“йқўдҝ®еҪўи®ҫи®Ўзӯүж–№йқўпјҢйҡҸзқҖеҜ№иҮӘеҠЁжңәжў°й«ҳйҖҹгҖҒй«ҳзІҫеәҰзҡ„иҰҒжұӮпјҢеӣҪеҶ…еӨ–йҖҗжёҗйҮҚи§Ҷдј еҠЁжңәжһ„зҡ„еҠЁеҠӣеӯҰй—®йўҳпјҢдј еҠЁжңәжһ„зҡ„еҠЁжҖҒжҖ§иғҪзӣҙжҺҘеҪұе“ҚзқҖе…¶дј еҠЁзІҫеәҰпјҢж•…жңүеҝ…иҰҒеҜ№жңәжһ„зҡ„еҠЁеҠӣеӯҰиҝӣиЎҢз ”з©¶гҖӮжң¬ж–Үе°ҶйҖҡиҝҮе»әз«Ӣжңәз”өиҖҰеҗҲзі»з»ҹпјҢз»“еҗҲеҠЁжҖҒд»ҝзңҹиҝӣиЎҢеҲҶжһҗпјҢз ”з©¶е…¶еҠЁжҖҒзү№жҖ§еҸҠзӣёе…іеҸӮж•°зҡ„еҪұе“ҚгҖӮ
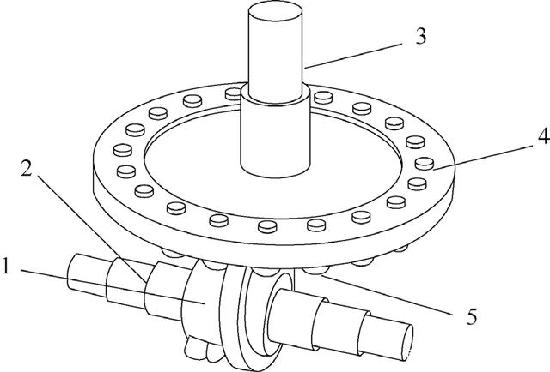
1. еңҶжҹұеҮёиҪ® 2. иҫ“е…ҘиҪҙ 3. иҫ“еҮәиҪҙ 4. д»ҺеҠЁзӣҳ 5. еңҶжҹұж»ҡеӯҗеӣҫ1 дј еҠЁжңәжһ„з»“жһ„еҪўејҸ
еӣҫ2 дёәе…·дҪ“зҡ„жңәз”өзі»з»ҹи®ҫи®ЎжөҒзЁӢпјҢйҖҡиҝҮADAMS иҪҜ件дёҺMatlab/Simulink иҪҜ件иҝӣиЎҢжңәз”өиҒ”еҗҲд»ҝзңҹйңҖиҰҒеҖҹеҠ©ADAMS/Controls жҺҘеҸЈжЁЎеқ—пјҢд»Ҙе®һзҺ°дёӨд»ҝзңҹиҪҜ件д№Ӣй—ҙж•°жҚ®зҡ„е…ұз”Ёе’ҢдәӨдә’пјҢе®ҢжҲҗжңәжў°зі»з»ҹдёҺжҺ§еҲ¶зі»з»ҹд№Ӣй—ҙзҡ„иҝһжҺҘпјҢд»ҺиҖҢе®һзҺ°жңәз”өиҒ”еҗҲд»ҝзңҹгҖӮжңәз”өиҒ”еҗҲд»ҝзңҹжҠҖжңҜиғҪеӨҹиҫғзңҹе®һзҡ„еҸҚжҳ зі»з»ҹж•ҙдҪ“зү№жҖ§пјҢдёәиҺ·еҫ—дјҳз§Җзҡ„жңәз”өзі»з»ҹз»јеҗҲжҖ§иғҪжҸҗдҫӣдҫқжҚ®гҖӮ
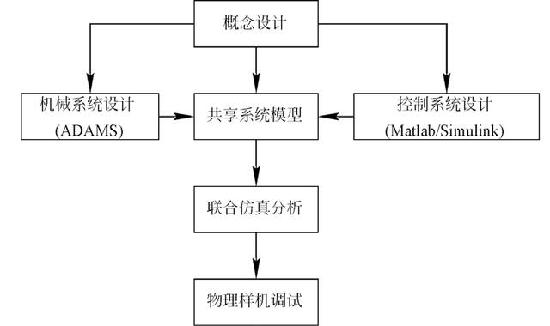
еӣҫ2 жңәз”өзі»з»ҹи®ҫи®ЎжөҒзЁӢ
1 жңәпјҚз”өиҒ”еҗҲд»ҝзңҹжЁЎеһӢе»әз«Ӣ1.1 жңәжў°зі»з»ҹжЁЎеһӢе»әз«ӢеңЁй«ҳйҖҹйҮҚиҪҪе·ҘеҶөдёӢиҝҗиҪ¬ж—¶пјҢз”ұдәҺжғҜжҖ§иҙҹиҪҪгҖҒй…ҚеҗҲй—ҙйҡҷзӯүеӣ зҙ зҡ„еҪұе“ҚпјҢеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„дјҡеҸ‘з”ҹеј№жҖ§еҸҳеҪўпјҢе…¶дёӯжңәжһ„зҡ„иҫ“е…ҘиҪҙе’Ңиҫ“еҮәиҪҙеҪұе“ҚжңҖжҳҺжҳҫпјҢеҚідҪҝиҪ»еҫ®зҡ„еј№жҖ§еҸҳеҪўд№ҹдјҡжҳҺжҳҫеҪұе“Қжңәжһ„зҡ„еҠЁжҖҒзү№жҖ§гҖӮдёәдәҶжӯЈзЎ®ең°еҸҚжҳ жңәжһ„еҠЁжҖҒдј еҠЁзү№жҖ§пјҢжңүеҝ…иҰҒеҜ№е»әз«Ӣзҡ„иҷҡжӢҹж ·жңәжЁЎеһӢиҫ“е…ҘиҪҙе’Ңиҫ“еҮәиҪҙиҝӣиЎҢжҹ”жҖ§еҢ–еӨ„зҗҶгҖӮз”ұдәҺиҫ“е…Ҙиҫ“еҮәиҪҙзҡ„еҪўзҠ¶и§„еҲҷпјҢеҸҜзӣҙжҺҘеә”з”ЁADAMS иҮӘеёҰзҡ„жҹ”жҖ§е·Ҙе…·з®ұAuto/Flex еҜ№е…¶иҝӣиЎҢжҹ”жҖ§еҢ–еӨ„зҗҶгҖӮз”ұдәҺиҫ“еҮәиҪҙзҡ„еҸҳеҪўеңЁжңүиҙҹиҪҪзҡ„жғ…еҶөдёӢжӣҙеҠ жҳҺжҳҫпјҢеҸҜеңЁжЁЎеһӢдёӯж·»еҠ иҙҹиҪҪзӣҳпјҢд»ҘжЁЎжӢҹеңҶжҹұеҮёиҪ®жңәжһ„зңҹе®һдј еҠЁжғ…еҶөпјҢеҲӣе»әе®ҢжҲҗеҗҺзҡ„еҲҡжҹ”иҖҰеҗҲиҷҡжӢҹж ·жңәжЁЎеһӢеҰӮеӣҫ3 жүҖзӨәгҖӮ
еҲ©з”ЁADAMS/Controls жЁЎеқ—е°Ҷе»әз«ӢеҘҪзҡ„еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„зҡ„ж ·жңәжЁЎеһӢдҪңдёәдёҖдёӘжңәжў°зі»з»ҹжЁЎеһӢеј•е…ҘеҲ°Simulink жҺ§еҲ¶зі»з»ҹд»ҝзңҹжЁЎеһӢдёӯпјҢд»Ҙе®һзҺ°еңЁжҺ§еҲ¶зі»з»ҹзҺҜеўғдёӢзҡ„жңәз”өиҒ”еҗҲд»ҝзңҹпјҢеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„иҒ”еҗҲд»ҝзңҹжңәжў°еӯҗзі»з»ҹзҡ„е»әз«ӢеҢ…жӢ¬еҲӣе»әзі»з»ҹзҠ¶жҖҒеҸҳйҮҸгҖҒи®ҫе®ҡиҫ“е…ҘдёҺиҫ“еҮәеҸҳйҮҸгҖҒи®ҫе®ҡжҺ§еҲ¶еҸӮж•°гҖҒз”ҹжҲҗиў«жҺ§жЁЎеһӢзӯүжӯҘйӘӨпјҢжңҖз»ҲиҺ·еҫ—иҒ”еҗҲд»ҝзңҹжңәжў°еӯҗзі»з»ҹжЁЎеқ—пјҢеҰӮеӣҫ4 жүҖзӨәгҖӮ
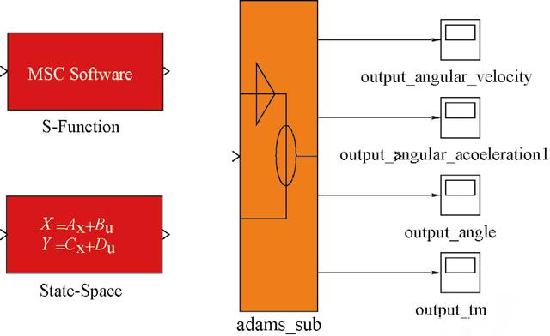
еӣҫ4 иҒ”еҗҲд»ҝзңҹдј еҠЁжңәжһ„иў«жҺ§жЁЎеқ—
1.2 е»әз«Ӣж°ёзЈҒеҗҢжӯҘз”өжңәзҹўйҮҸжҺ§еҲ¶жЁЎеһӢеҲ©з”ЁSimulink зҺҜеўғдёӯеҠҹиғҪдё°еҜҢзҡ„з”өеҠӣзі»з»ҹжЁЎеқ—еә“пјҢеҸҜж–№дҫҝең°е®ҢжҲҗж°ёзЈҒеҗҢжӯҘз”өжңәзҹўйҮҸжҺ§еҲ¶д»ҝзңҹжЁЎеһӢзҡ„е»әз«ӢгҖӮж №жҚ®жЁЎеқ—еҢ–е»әжЁЎж–№жі•йҰ–е…ҲеҸҜе°Ҷд»ҝзңҹзі»з»ҹеҲ’еҲҶжҲҗж°ёзЈҒеҗҢжӯҘз”өжңәжЁЎеқ—(PMSM)гҖҒдёүзӣёйҖҶеҸҳжҺ§еҲ¶жЁЎеқ—гҖҒdq/abc еқҗж ҮеҸҳжҚўжЁЎеқ—д»ҘеҸҠйҖҹеәҰPI жҺ§еҲ¶еҷЁжЁЎеқ—зӯү4 дёӘжЁЎеқ—пјҢ然еҗҺе°ҶиҝҷдәӣеӯҗеҠҹиғҪжЁЎеқ—жҢүз…§жҺ§еҲ¶еҺҹзҗҶеӣҫиҝһжҺҘиө·жқҘд»Ҙе®ҢжҲҗж•ҙдёӘжҺ§еҲ¶зі»з»ҹзҡ„е»әжЁЎпјҢж•ҙдҪ“д»ҝзңҹжЁЎеһӢеҰӮеӣҫ5гҖӮ
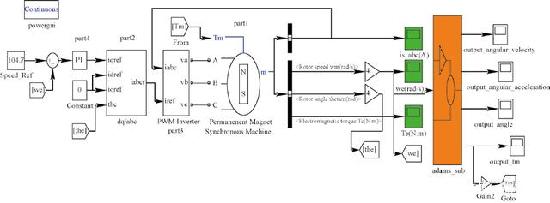
еӣҫ5 PMSM зҹўйҮҸжҺ§еҲ¶д»ҝзңҹжЁЎеһӢ
е°Ҷеӣҫ4 жүҖзӨәзҡ„иҒ”еҗҲд»ҝзңҹжңәжў°еӯҗзі»з»ҹжЁЎеқ—е’Ңеӣҫ5 жүҖзӨәзҡ„з”өжңәзҹўйҮҸжҺ§еҲ¶зі»з»ҹжЁЎеһӢиҒ”еҗҲиө·жқҘпјҢеҚіеҫ—еҲ°еҹәдәҺPIжҺ§еҲ¶зҡ„еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁзі»з»ҹжңә—з”өиҒ”еҗҲд»ҝзңҹжЁЎеһӢпјҢеҰӮеӣҫ6 жүҖзӨәгҖӮ
еӣҫ6 жңә—з”өиҒ”еҗҲд»ҝзңҹжЁЎеһӢ
2 еҹәдәҺPI жҺ§еҲ¶зҡ„жңәз”өиҒ”еҗҲд»ҝзңҹеңЁиҝӣиЎҢжңәз”өиҒ”еҗҲд»ҝзңҹеүҚйңҖиҰҒе…ҲиҝӣиЎҢзӣёе…іеҸӮж•°зҡ„и®ҫзҪ®пјҢе…¶дёӯиҪ¬йҖҹеҖјдёә1 000 r/minпјҢеј§еәҰдёә104.7 rad/sпјҢд»ҝзңҹж—¶й—ҙдёә0.5 sпјҢжұӮи§ЈеҷЁи®ҫзҪ®дёәode45 жұӮи§ЈеҷЁпјҢи®ҫзҪ®2иҪҜ件数жҚ®дәӨжҚўжӯҘй•ҝдёә0.000 5пјҢе°Ҷд»ҝзңҹжЁЎејҸи®ҫзҪ®жҲҗдәӨдә’ејҸи®Ўз®—(interactive)пјҢеңЁжңәз”өзі»з»ҹиҒ”еҗҲд»ҝзңҹдёӯиҮӘеҠЁеҗҜеҠЁADAMS/ViewпјҢе®һж—¶и§ӮеҜҹжңәжһ„иҝҗеҠЁжғ…еҶөгҖӮд»ҝзңҹз»“жһңеҰӮеӣҫ7 пҪһеӣҫ10 жүҖзӨәгҖӮ
еӣҫ7 дёәз”өжңәиҫ“е…Ҙи§’йҖҹеәҰжӣІзәҝпјҢж°ҙе№ізәўиүІзӣҙзәҝдёәз”өжңәиҫ“е…ҘиҪ¬йҖҹзҗҶи®әеҖј104.7 rad/sгҖӮд»ҺеӣҫдёӯеҸҜзҹҘпјҢз”өжңәе®һйҷ…иҪ¬йҖҹеңЁзҗҶи®әеҖјйҷ„иҝ‘жңүе°Ҹе№…еәҰзҡ„жіўеҠЁпјҢдё”еҒ¶е°”еӯҳеңЁдёҖе®ҡзҡ„жіўеі°жғ…еҶөпјҢиҜҙжҳҺдј еҠЁжңәжһ„иҝҗеҠЁзҠ¶жҖҒзҡ„еҸҳеҢ–еҜ№з”өжңәзҡ„иҫ“е…ҘиҪ¬йҖҹеӯҳеңЁдёҖе®ҡзҡ„еҪұе“ҚпјҢиҜҘд»ҝзңҹз»“жһңиЎЁжҳҺдәҶеңҶжҹұеҮёиҪ®дј еҠЁжңәжһ„дёҺз”өжңәд№Ӣй—ҙзҡ„зӣёдә’иҖҰеҗҲдҪңз”ЁгҖӮ
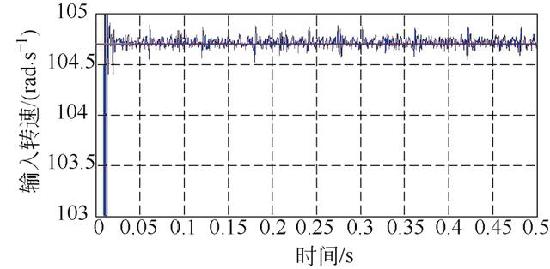
еӣҫ7 иҫ“е…ҘиҪ¬йҖҹжӣІзәҝ
еӣҫ8 дёәдј еҠЁзі»з»ҹзҡ„иҫ“еҮәи§’йҖҹеәҰе“Қеә”жӣІзәҝпјҢд»ҺеӣҫдёӯеҸҜзҹҘпјҢиҫ“еҮәи§’йҖҹеәҰеҖјдёҺзҗҶи®әеҖј5.235 rad/s еҹәжң¬дёҖиҮҙпјҢзЁіжҖҒиҝҗиЎҢж—¶е…¶жңҖеӨ§и§’йҖҹеәҰеҖјдёә5.712 rad/sпјҢи¶…еҮәзҗҶи®әеҖј9%пјҢд»ҝзңҹз»“жһңжҳҫзӨәз»ҸPI жҺ§еҲ¶еҗҺзҡ„и§’йҖҹеәҰжӣІзәҝжіўеҠЁе№…еәҰе’Ңж¬Ўж•°йғҪеӨ§еӨ§еҮҸе°ҸпјҢжңәжһ„иҝҗиЎҢжӣҙеҠ е№ізЁігҖӮ
еӣҫ8 иҫ“еҮәи§’йҖҹеәҰжӣІзәҝ
еӣҫ9 дёәиҫ“еҮәи§’дҪҚ移жӣІзәҝпјҢз”ұеӣҫеҸҜзҹҘпјҢжңәжһ„иҝҗиЎҢ0.5 sиҫ“еҮәдәҶ150°пјҢиҜҘи§’дҪҚ移жӣІзәҝдёҺзҗҶи®әи§’дҪҚ移е®Ңе…ЁдёҖиҮҙгҖӮ
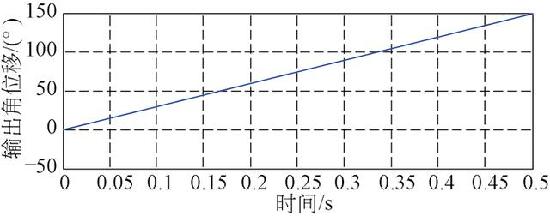
еӣҫ9 иҫ“еҮәи§’дҪҚ移жӣІзәҝ
еӣҫ10 дёәиҫ“еҮәи§’еҠ йҖҹеәҰд»ҝзңҹжӣІзәҝпјҢд»ҺеӣҫдёӯеҸҜзҹҘпјҢеңЁжңәжһ„дј еҠЁиҝҮзЁӢеҲқе§Ӣйҳ¶ж®өеҮәзҺ°иҫғеӨ§зҡ„жҢҜеҠЁпјҢи§’еҠ йҖҹеәҰеҖјиҝ…йҖҹдҝқжҢҒеңЁ0 rad/s йҷ„иҝ‘е°Ҹе№…еәҰжіўеҠЁпјҢдҝқиҜҒдәҶжңәжһ„иҝҗиЎҢзҡ„е№ізЁіжҖ§гҖӮеҪ“жңәжһ„иҝҗиЎҢжҲҗзЁіжҖҒж—¶пјҢеңЁдј еҠЁиҝҮзЁӢдёӯеӯҳеңЁеҒ¶е°”зҡ„еҶІеҮ»жҢҜеҠЁпјҢе…¶дә§з”ҹзҡ„еҺҹеӣ еҸҜиғҪжҳҜеӣ иҪ¬зӣҳгҖҒж»ҡеӯҗзӯүжһ„件зҡ„еј№жҖ§еҸҳеҪўд»ҘеҸҠж¶Ұж»‘зӯүеӣ зҙ зҡ„еҪұе“ҚиҖҢеҜјиҮҙпјҢдҪҶжӣІзәҝжҖ»дҪ“еҸҳеҢ–и¶ӢеҠҝз¬ҰеҗҲжңәжһ„е®һйҷ…иҝҗеҠЁи§„еҫӢпјҢ并йҖҡиҝҮPI жҺ§еҲ¶еҗҺжңәжһ„иҝҗиҪ¬жҲҗзЁіжҖҒж—¶зҡ„иҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјдёә682 rad/sпјҢеҸҜеҸ‘зҺ°PI жҺ§еҲ¶еҗҺиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјеӨ§еӨ§еҮҸе°ҸпјҢиҫ“еҮәи§’еҠ йҖҹеәҰжӣІзәҝзҡ„ж•ҙдҪ“жіўеҠЁе№…еәҰе’ҢжіўеҠЁж¬Ўж•°йғҪжҳҺжҳҫеҮҸе°ҸпјҢеҶҚж¬ЎиҜҙжҳҺз»ҸPI жҺ§еҲ¶еҗҺдј еҠЁзі»з»ҹзҡ„ж•ҙдҪ“еҠЁжҖҒжҖ§иғҪжӣҙдјҳгҖӮ
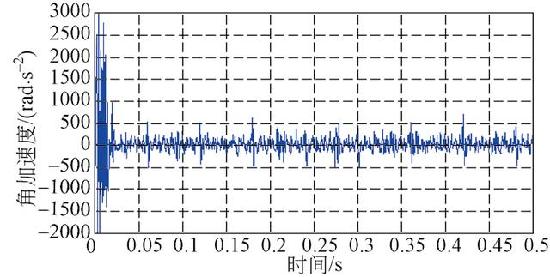
еӣҫ10 иҫ“еҮәи§’еҠ йҖҹеәҰжӣІзәҝ
3 иҪ¬йҖҹгҖҒиҙҹиҪҪеҜ№еҠЁжҖҒзү№жҖ§зҡ„еҪұе“ҚеҲҶжһҗдёәдәҶжӣҙеҠ е…Ёйқўзҡ„з ”з©¶еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁзі»з»ҹзҡ„еҠЁжҖҒжҖ§иғҪпјҢж №жҚ®е»әз«Ӣзҡ„жңәз”өд»ҝзңҹжЁЎеһӢпјҢд»Ҙиҫ“еҮәи§’еҠ йҖҹеәҰеҖјдёәеҲҶжһҗжҢҮж ҮпјҢз ”з©¶зі»з»ҹеңЁдёҚеҗҢиҪ¬йҖҹе’ҢиҙҹиҪҪе·ҘеҶөдёӢеҠЁжҖҒе“Қеә”зү№жҖ§е№¶еҪ’зәіжҖ»з»“е…¶еҶ…еңЁи§„еҫӢгҖӮ
3.1 иҪ¬йҖҹеҜ№еҠЁжҖҒзү№жҖ§зҡ„еҪұе“ҚеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„йңҖиҰҒеңЁдёҚеҗҢзҡ„иҪ¬йҖҹдёӢиҝҗиЎҢд»Ҙж»Ўи¶іе®һйҷ…е·ҘдҪңзҡ„йңҖиҰҒпјҢж•…еңЁдёҚиҖғиҷ‘иҙҹиҪҪзҡ„е·ҘеҶөдёӢпјҢеҲҶеҲ«и®ҫе®ҡз”өжңәиҪ¬йҖҹдёә100 r/minгҖҒ500 r/minгҖҒ1 000 r/minгҖҒ1500 r/minпјҢдҝқжҢҒе…¶д»–еҸӮж•°и®ҫзҪ®дёҖиҮҙпјҢз ”з©¶дёҚеҗҢиҪ¬йҖҹдёӢеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁзі»з»ҹзҡ„еҠЁжҖҒжҖ§иғҪпјҢдёҚеҗҢиҪ¬йҖҹдёӢзҡ„иҫ“еҮәи§’еҠ йҖҹеәҰд»ҝзңҹз»“жһңеҰӮеӣҫ11 жүҖзӨәгҖӮ

еӣҫ11 дёҚеҗҢиҪ¬йҖҹдёӢиҫ“еҮәи§’еҠ йҖҹеәҰе“Қеә”жӣІзәҝ
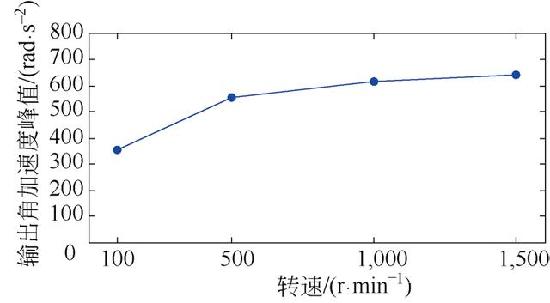
еҜ№еӣҫ11 жүҖзӨәдёҚеҗҢиҪ¬йҖҹдёӢзҡ„иҫ“еҮәи§’еҠ йҖҹеәҰе“Қеә”жӣІзәҝиҝӣиЎҢеҜ№жҜ”еҲҶжһҗпјҢеҸ‘зҺ°иҪ¬йҖҹеҜ№иҫ“еҮәи§’еҠ йҖҹеәҰеӯҳеңЁдёҖе®ҡеҪұе“ҚгҖӮйҡҸзқҖиҪ¬йҖҹзҡ„еўһеҠ пјҢдј еҠЁжңәжһ„зҡ„иҫ“еҮәи§’еҠ йҖҹеәҰе‘ҲзҺ°дёҖе®ҡзҡ„еўһеӨ§и¶ӢеҠҝпјҢ4 з§Қиҫ“е…ҘиҪ¬йҖҹдёӢзҡ„еҠ йҖҹеәҰеі°еҖјеҲҶеҲ«дёә354.442rad/sгҖҒ557.014 rad/sгҖҒ616.459 rad/sгҖҒ638.982 rad/sгҖӮдёәдәҶжӣҙеҠ жҳҺжҳҫең°и§ӮеҜҹиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјдёҺиҫ“е…ҘиҪ¬йҖҹзҡ„е…ізі»пјҢеҸҜе°Ҷе…¶з»ҳеҲ¶жҲҗеҰӮеӣҫ12 жүҖзӨәжӣІзәҝгҖӮ
еӣҫ12 иҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјдёҺиҫ“е…ҘиҪ¬йҖҹе…ізі»еӣҫ
з”ұеӣҫ12 еҸҜзҹҘпјҢиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјдёҺиҫ“е…ҘиҪ¬йҖҹе‘ҲйқһзәҝжҖ§жӯЈзӣёе…іе…ізі»гҖӮеҪ“иҫ“е…ҘиҪ¬йҖҹеӨ§дәҺ500 r/min еҗҺпјҢиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖје№¶жңӘеҸ‘з”ҹеӨӘеӨ§еҸҳеҢ–пјҢе…¶еҖјеҹәжң¬зЁіе®ҡеңЁ600rad/s е·ҰеҸігҖӮеҗҢж—¶пјҢеҜ№жҜ”еҲҶжһҗеӣҫ11 дёӯ4 з§ҚиҪ¬йҖҹдёӢзҡ„иҫ“еҮәи§’еҠ йҖҹеәҰжӣІзәҝпјҢеҸ‘зҺ°еҪ“иҪ¬йҖҹд»Һ100 r/min еўһеҠ еҲ°1 500 r/min ж—¶пјҢи§’еҠ йҖҹеәҰеҖјж•ҙдҪ“并жңӘеўһеҠ еӨӘеӨҡпјҢиҖҢиҫ“еҮәи§’еҠ йҖҹеәҰжӣІзәҝжіўеҠЁж¬Ўж•°жңүдёҖе®ҡзҡ„дёӢйҷҚпјҢиҜҙжҳҺй«ҳиҪ¬йҖҹиҝҗиҪ¬ж—¶еҮёиҪ®дёҺж»ҡеӯҗд№Ӣй—ҙзҡ„зў°ж’һж¬Ўж•°дёӢйҷҚпјҢиҝҷжңүж•Ҳең°еҮҸе°‘зў°ж’һеҜ№еҮёиҪ®е·ҘдҪңжӣІйқўзҡ„еҪұе“ҚпјҢдҪ“зҺ°еҮәиҜҘеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„еҸҜйҖӮз”ЁдәҺдёҖе®ҡиҢғеӣҙзҡ„й«ҳйҖҹиҝҗиҪ¬е·ҘдҪңзҺҜеўғгҖӮ
3.2 иҙҹиҪҪеҜ№еҠЁжҖҒзү№жҖ§зҡ„еҪұе“ҚдҝқжҢҒе…¶д»–еҸӮж•°дёҖиҮҙпјҢеңЁиҙҹиҪҪзӣҳдёҠеҠ иҪҪдёҚеҗҢеӨ§е°Ҹзҡ„еҸҚеҗ‘жүӯзҹ©еҚіеҸҜз ”з©¶еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„еңЁдёҚеҗҢиҙҹиҪҪжқЎд»¶дёӢзҡ„еҠЁжҖҒзү№жҖ§пјҢеӣҫ13 жҸҸиҝ°дәҶиҪ¬йҖҹдёә1 000 r/minпјҢиҙҹиҪҪеҲҶеҲ«дёә0 N·mгҖҒ50 N·mгҖҒ100 N·mгҖҒ200 N·mгҖҒ400 N·mзӯүе·ҘеҶөдёӢзҡ„иҫ“еҮәи§’еҠ йҖҹеәҰжӣІзәҝгҖӮ
еҜ№жҜ”еҲҶжһҗеӣҫ13 дёӯдёҚеҗҢиҙҹиҪҪдёӢзҡ„иҫ“еҮәи§’еҠ йҖҹеәҰе“Қеә”жӣІзәҝпјҢеҸ‘зҺ°иҙҹиҪҪеҜ№иҫ“еҮәз«Ҝзҡ„и§’еҠ йҖҹеәҰеҪұе“ҚиҫғеӨҚжқӮпјҢйҡҸзқҖиҙҹиҪҪзҡ„еўһеӨ§пјҢе…¶иҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјеҲҶеҲ«дёә616.459 rad/sгҖҒ 541.591 rad/sгҖҒ438.119 rad/sгҖҒ687.734 rad/sгҖҒ853.436 rad/sпјҢеҸҜе°Ҷиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјдёҺиҙҹиҪҪиҪ¬зҹ©е…ізі»з»ҳеҲ¶жҲҗеӣҫ14 жүҖзӨәжӣІзәҝгҖӮз”ұеӣҫ14 еҸҜзҹҘпјҢиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјдёҺиҙҹиҪҪе‘ҲзҺ°дёҖе®ҡзҡ„йқһзәҝжҖ§е…ізі»пјҢе…¶еҸҳеҢ–и¶ӢеҠҝйҡҸиҙҹиҪҪзҡ„еўһеӨ§иҖҢеўһеӨ§пјҢдҪҶеңЁжҹҗдәӣе·ҘеҶөдёӢеҮәзҺ°дёҖе®ҡзҡ„жіўи°·гҖӮ
еӣҫ14 жүҖзӨәзҡ„иҙҹиҪҪдёә100 N·m ж—¶пјҢиҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјжңҖе°ҸпјҢеҗҢж—¶еҜ№жҜ”еӣҫ13пјҢдёҚеҗҢиҙҹиҪҪдёӢзҡ„иҫ“еҮәи§’еҠ йҖҹеәҰжӣІзәҝпјҢеҸ‘зҺ°жіўеі°дҪҚзҪ®дјҡйҡҸиҙҹиҪҪзҡ„еўһеҠ иҖҢеўһеӨ§пјҢдҪҶдёҚеҗҢиҙҹиҪҪдёӢзҡ„жӣІзәҝж•ҙдҪ“еҸҳеҢ–и¶ӢеҠҝеҹәжң¬дёҖиҮҙпјҢйҷӨеҺ»еі°еҖјдҪҚзҪ®еҹәжң¬еңЁ±300 rad/s еҶ…жіўеҠЁпјҢдё”е…¶иҫ“еҮәи§’еҠ йҖҹеәҰеі°еҖјзӣёе·®е№¶дёҚеӨ§пјҢиҜҙжҳҺиҙҹиҪҪеҜ№еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„зҡ„еҠЁжҖҒзү№жҖ§жҖ»дҪ“еҪұе“ҚдёҚеӨӘжҳҺжҳҫпјҢж•…иҜҘдј еҠЁжңәжһ„йҖӮз”ЁдәҺдёҖе®ҡиҢғеӣҙеҶ…зҡ„йҮҚиҪҪиҪҪиҚ·е·ҘеҶөпјҢ并еңЁдёҚеҗҢзҡ„иҙҹиҪҪдёӢйғҪеҸҜе№ізЁіиҝҗиЎҢ并дҝқжҢҒиҫғй«ҳзҡ„дј еҠЁзІҫеәҰгҖӮ

еӣҫ13 дёҚеҗҢиҙҹиҪҪдёӢиҫ“еҮәи§’еҠ йҖҹеәҰе“Қеә”жӣІзәҝ
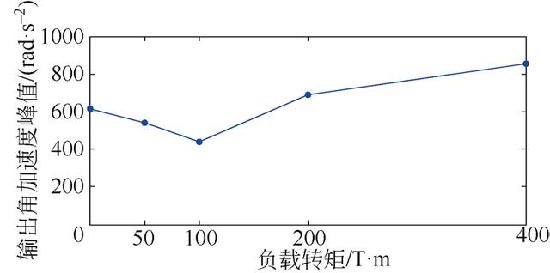
еӣҫ14 жңҖеӨ§и§’еҠ йҖҹеәҰдёҺиҙҹиҪҪиҪ¬зҹ©зҡ„е…ізі»
4 жҖ»з»“1пјүе»әз«ӢеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁжңәжһ„еҲҡжҹ”иҖҰеҗҲжЁЎеһӢпјҢйҖҡиҝҮADAMS/Controls жЁЎеқ—е»әз«Ӣдј еҠЁжңәжһ„иҒ”еҗҲд»ҝзңҹиў«жҺ§жЁЎеһӢпјҢеңЁSimulink дёӯж №жҚ®ж°ёзЈҒеҗҢжӯҘз”өжңәж•°еӯҰжЁЎеһӢеҸҠе…¶зҹўйҮҸжҺ§еҲ¶еҺҹзҗҶе»әз«ӢжҺ§еҲ¶зі»з»ҹд»ҝзңҹжЁЎеһӢпјҢиҒ”з«ӢжңәгҖҒз”өд»ҝзңҹжЁЎеһӢиҝӣиЎҢдәҶжңәз”өзі»з»ҹеҠЁжҖҒд»ҝзңҹеҲҶжһҗпјҢд»ҝзңҹз»“жһңдёҺе®һйҷ…иҝҗеҠЁи§„еҫӢеҹәжң¬дёҖиҮҙпјҢиҫғеҘҪең°дҪ“зҺ°дәҶжңәз”өиҖҰеҗҲзү№жҖ§пјҢ并з»ҸPI жҺ§еҲ¶еҗҺжңәжһ„дј еҠЁжӣҙеҠ е№ізЁіпјҢеҗҢж—¶йӘҢиҜҒдәҶзі»з»ҹеҠЁеҠӣеӯҰжЁЎеһӢе»әз«Ӣзҡ„жӯЈзЎ®жҖ§гҖӮ
2пјүеҲҶжһҗдәҶеңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁзі»з»ҹеңЁдёҚеҗҢиҪ¬йҖҹгҖҒдёҚеҗҢиҙҹиҪҪдёӢзҡ„еҠЁжҖҒзү№жҖ§пјҢеҜ№иҜҘдј еҠЁзі»з»ҹзҡ„еҠЁжҖҒжҖ§иғҪиҝӣиЎҢдәҶз ”з©¶пјҢиҝҷеҜ№еңҶжҹұеҮёиҪ®иҝһз»ӯдј еҠЁзі»з»ҹзҡ„и®ҫи®Ўд»ҘеҸҠе…¶еә”з”ЁзҺҜеўғжҸҗдҫӣдёҖе®ҡзҡ„зҗҶи®әжҢҮеҜјпјҢеҜ№дәҺеә”з”ЁеңЁжёҜеҸЈиө·йҮҚжңәзӯүзӣёе…ійўҶеҹҹеҶ…дёҚеҗҢиҪ¬иҙҹиҪҪзҡ„е·ҘеҶөдёӢзҡ„иЎЁзҺ°жңүдәҶжё…жҘҡзҡ„и®ӨиҜҶгҖӮ





















