资讯
资讯 整机
整机 二手
二手 配件
配件 租赁
租赁 人才
人才
这几天在上海的进博会上,Nokia展示了基于5G的远程驾驶平台(车辆实体的合作方是红旗)。在上海虹桥展览馆内,通过5G网络远程驾驶一辆位于展览馆北广场室外自动驾驶场地上的一辆红旗改造车,如下图:

通常来说,这种技术原型在早期,也就只能存活在各种“展览会”或者“展厅”里,难掀波澜。实际上这种基于5G的远程驾驶(Remote Driving)也不是第一次展示了,几乎每一个主设备厂商和主要的移动运营商,都在各种场合展示过了,早就不新鲜了。甚至去年有个综艺节目还展示了清华大学提供的一个5G远程驾驶的改造车辆。可这次在进口博览会上的展示,还是在新闻界和业外受众中,引起了不小的轰动、轰动、轰动?………
感觉有点不理解,不吐不快。
从技术分类上讲,基于车联网的自动驾驶技术有两个技术选择,一个是北美标准,DSRC。其本质是一种改良的WiFi技术,优缺点都特别突出,不在我们本文的讨论范围之内(现在中美这个对立局面,也基本不在国家的考虑范围之内);另一种是C-V2X技术,又有两个技术分支,阶段性上有关联,先是基于4G技术的LTE-V2X,也是现行的完整标准;再就是基于5G技术的NR-V2X,本文焦点。
考虑到5G技术有不算小的“中国属性”(要不美国也不会这么不遗余力要整华为),所以5G在国内算是妇孺皆知的“明星技术”or“自强技术”。不管这种感觉是不是过于自信和爱国,但总还是朴素的。所以我能理解公众对于一切5G相关的高关注度。
实际上,正是因为5G技术在可靠性、低时延和大宽带上几乎同时实现了“并驾齐驱”般的实现,因此相对于前代无线技术确实算是划时代的进步,也是人类第一次完成了真正意义上的“通用无线网络”的标准制定。在去年底的R16标准草案中(5G的一个阶段性标准版本),低时延的URLLC(Ultra-Reliable and Low Latency Control)得到明确,将会是和已经实现的高宽带(MBB)特性一样,将在2019年的实际产品中落地,明确了5G可以爆发出卓尔不群的技术优势的具体时间点。
在这个基础之上,5G网络本身确实具备了真正参与“自动驾驶”建设的特性。但问题是,我们到底应该如何定位5G在“自动驾驶”体系建设中所应该扮演的具体角色呢?
参照R16(3GPP主导的5G标准化版本)的业务文件,3GPP TS 22.186(Enhancement of 3GPP support for V2X scenarios, stage-1, Release16)是定义5G技术专门针对V2X场景所定义的增强服务类别和具体内容。其中关于5G网络作为远程驾驶管道的业务有如下简单定义:
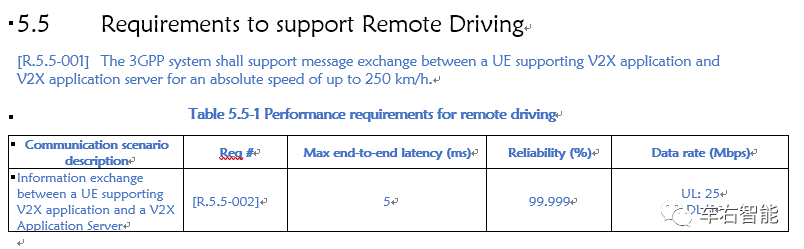
非常简单,除了在标准文件里占个坑,具体的指标只给出了三个数字:
1 端到端的单项时延不高于5ms;这里的端到端指的是被控车辆到远端“驾驶员”的总时延;
2 可靠性不小于99.999%;
3 数据速率在车辆运动速度为250Kmph的条件下,可以实现UL25Mbps/DL1Mbps。
相同文件里其实还定义了其它的业务,例如:编队驾驶(V2V V2I)、单车传感器扩展(V2V)、先进驾驶的通讯功能渗透(V2V V2I V2P)等等,基本上每个业务都是既涉及空口链路的物理性能也涉及具体的业务形态和逻辑。业务的提前申请和确立,往往是决定3GPP是否开发相关技术甚至整个网络技术新版本的依据和出发点,5G网络当然不是仅仅由“自动驾驶”技术所触发和推动的,但是5G对于“自动驾驶”领域的主要技术贡献,本质还是在于“低时延、高可靠性”的管道特性上。
对于远程驾驶,5ms、99.999%和UL25M/DL1Mbps的性能指标,仅仅代表了通讯界的标准化组织3GPP及其成员单位们,对于5G空口被应用于“自动驾驶”领域中具体的“远程驾驶”这个业务中的性能需求。并不能代表3GPP对于“远程驾驶”这个业务逻辑的支持,更不能说明通讯界充分理解了“自动驾驶”的复杂性。
对于通讯界来说,远程驾驶可以满足绝大多数信息接收者对于“高技术”的期待,那种惊讶和一点点不理解,才是向世人证明5G的空中接口具备前所未有的高性能的最好宣传方式和效果。这种情绪来源应该多半都应该是下图:

这是美军无人机操控仓的形态,似乎把对于汽车操控的“远程驾驶”改造成这个样子,就十分容易被公众接受为“高技术”。但其实公众的认知水准,是无法考虑这背后的细节差异的:
无人机的飞行空间和飞行动作参数,可以对远程操作动作的时延具备非常大的容忍度。我们就用美军在中东的无人机基地举例,多集中在阿富汗的南部地区,比如Kandahar(坎大哈),而无人机执行无人侦察和攻击任务的地区多在伊朗和阿富汗边境的山区。两者之间距离相距500-800公里以上。从操作中心到战场上空无人机的空中链路经由卫星中继之后,会高达2000公里以上。信号从地面发送、到卫星处理和转发、再到无人机接受、处理和响应,这一系列动作单向时延就在秒级,双向则翻倍,可实际上我们没人听说过无人机因为时延而坠毁的新闻。这就是无人机执飞环境对于时延的非敏感性,秒级延时非但不影响战场侦察、战术专场等常规动作,甚至不会影响所谓的“闭环动作”:发现地面目标,识别跟踪后发射制导武器,不会错过战机。
但实际上,地面驾驶的车辆远比无人机所面临的空域情况复杂的多,毫秒级的时延也只是刚刚够用。按照3GPP的远程驾驶场景定义,车辆物体的运动速度最高需要支持250Kmph,单向时延5G顶多能提供5ms,这意味着被控车辆和施控主体不可能相聚很远,尤其不能跨越过多的汇聚和骨干节点,否则5G在空口上抠出来的那些单向时延,很快就被有线网络所吞噬了。
当然,时延只是一方面,更重要的是,通讯界并不实质理解“自动驾驶”领域所面临的最大问题,就是具备自动驾驶能力的车辆,如何保证自身完整和可信的安全性校验问题。在“远程驾驶”中,被控车辆和施控主体之间的5G系统的地位至少也将被置于单点环节的风险。
反过来考虑,如果车辆本身具备足够的自动驾驶智能,那么“远程驾驶”的应用场景就会被极大的压缩,而被限定在极特殊的环境下的“远程驾驶”就没有他今天在展会上的光鲜亮丽。不过想想也是,看看特斯拉超级酷炫吊炸天的“Smart Summon”,本质就是本地版的“远程驾驶”,可靠性……嘿嘿,除了Tesla Crazy Fans,谁会拿自己的大几十万冒这个险呢?
综上,5G之余“自动驾驶”,最大的发力点还是基于V2V和V2I的高等级自动驾驶技术。综合车联网的能力,车辆的单车智能要求会放宽,道路上的各种非合作目标会大范围演进成合作目标,确实堪称自动驾驶早日实现的捷径。
车右智能
info@co-driver.ai
备注:
1 题图来自互联网检索,链接:http://6.eewimg.cn/news/uploadfile/2019/0321/1553129932508212.png;
2 图1来自微信公众号“拍者”;
3 图2来自3GPP标准文件3GPP TS 22.186 v16.1.0;
4 图3来自http://www.360doc.com/content/18/0531/11/16755731_758467835.shtml。