



引言:随着科技的不断发展,智能机器人正逐渐应用于各个领域,环卫领域也不例外。环卫机器人和无人驾驶环卫车作为智能化清洁设备,正在改变传统的环卫方式。但在很多时候会发现,环卫机器人和无人驾驶环卫车到底有什么区别?针对项目需求又该如何做选择?从技术维度看,孰强孰弱呢?
外观设计有什么区别?
环卫机器人通常外形轻巧灵活,更类似于一个小型的移动机器人。它们可以通过多个轮子、履带或腿部模仿人的步态进行自由移动,环卫机器人通常较小型,移动速度较慢,使用电池驱动。它们携带的传感器和设备相对简单,主要用于环境感知和清扫任务。

而无人驾驶环卫车则更类似于传统的环卫车辆,具备传统环卫车辆的外观特点和形态,在制造工艺上会更趋于车规级制造,可靠性和开放性上有由于机器人设备,而且以车为原型,在底盘制造方面会相对较高,通常较大且装备有清扫刷、吸尘器、水洗系统等传统环卫设备,具备较高的移动速度,使用传感器、激光雷达和相机等,实现对道路和交通情况的感知,需要具备较强的导航、控制和决策能力。

PS:当然了也有因为场景或者项目需求,将环卫机器人设计成车型外观或者形态的。这个区别取决于技术维度进行判断。
结构方面是否存在不一样的硬性标准?
环卫机器人和无人驾驶环卫车在结构方面存在一些不同的硬性标准,这是因为它们在设计上有不同的重点和应用场景。
轻巧灵活:环卫机器人需要具备轻巧灵活的特点,使其能够在狭小的环境中进行移动和操作,例如在人行道、小巷等地方进行清扫工作。

多传感器感知:为了能够进行环境感知和障碍物避难,环卫机器人通常配备多种传感器,如激光雷达、摄像头、超声波传感器等,以提供精确的环境信息。
自主导航:环卫机器人需要具备自主导航能力,能够根据传感器的反馈,进行路径规划和避障,以实现自动化的清洁工作。
所以我们才会在智慧环卫相关项目上,看到各种体积大小不一致的,各类智能环卫设备,有些叫环卫机器人,有些叫无人环卫车,让人难以分辨。
无人驾驶环卫车的结构标准则有一些不同:
大容量垃圾收集:无人驾驶环卫车通常需要具备较大容量的垃圾收集空间,以应对较大范围的垃圾清理需求,所以在垃圾箱容量基本是大容量为主。
高速行驶和路面适应性:无人驾驶环卫车需要设计结构以适应道路行驶,具备稳定的车辆操控能力和适应不同路况的能力。

自动驾驶系统:无人驾驶环卫车需要具备可靠的自动驾驶系统,包括传感器、定位和导航系统以及决策控制系统,能够实现可靠、安全的自动行驶和操作,如果要满足半封闭与开放式路段作业,需要满足L4级自动驾驶级别。
这些不同的硬性标准来源于环卫机器人和无人驾驶环卫车在应对不同环卫任务和工作环境时的需求差异。根据实际需求选择合适的设备结构是确保设备能够有效完成任务的关键。
功能特点又存在哪些差异化?
功能特点的差异源于环卫机器人和无人驾驶环卫车应对的不同工作场景和任务要求。环卫机器人具备多样化,在功能上也呈现这一属性,根据需求可以定制不同的机器人类型,比如:吸尘、擦洗、除草等功能,较为核心是形态多样性,能够清洁到角落或者相对狭小的空间。同时,环卫机器人通常与人工操作员进行协作,减轻操作员的劳动强度,提高作业效率。操作员可以通过遥控、控制中心等方式对机器人进行监控和控制。
而无人驾驶环卫车则恰恰相反,功能上刚好补充了环卫机器人的短板。
高效覆盖大面积:无人驾驶环卫车通常具备高速行驶能力,并且能够覆盖较大面积的工作区域,能够在城市道路、公园、停车场等地进行垃圾清理和收集。

自动化操作:无人驾驶环卫车具备自动化操作的能力,可以自主导航、规划清洁路径以及自动启停垃圾清理装置等功能,从而减少人力干预,提高工作效率。
大容量垃圾收集:由于无人驾驶环卫车的体积较大,可以容纳大量的垃圾,减少垃圾清理的频率,提高作业的效率。
技术维度上,两者有什么区别?谁的技术含量更高?
在技术维度上,环卫机器人和无人驾驶环卫车也存在一些区别和互补:
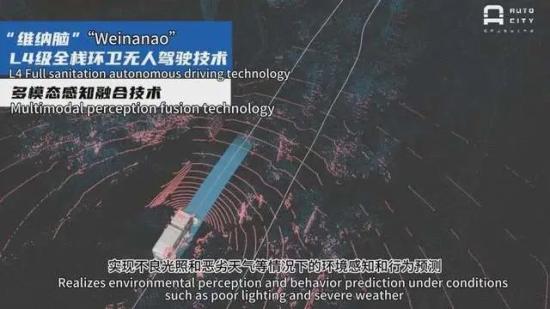
感知技术
环卫机器人通常搭载多个传感器,如视觉传感器、红外传感器、超声波传感器等,以感知周围的环境信息。这些传感器能够帮助机器人识别障碍物、人员和垃圾。而无人驾驶环卫车则在感知技术上更加侧重于利用激光雷达、摄像头和雷达来实现环境感知,以实现自主导航和智能避障。
导航与控制技术
环卫机器人通常依靠自主导航技术,在复杂的环境中进行路径规划和避障。操作者可以通过远程操作界面对机器人进行控制和监控。无人驾驶环卫车则依赖于自动驾驶系统,该系统集成了定位、导航、路径规划、环境感知等技术,通过实时地收集和分析环境数据,并做出智能决策,使车辆能够自主行驶和执行清洁任务。
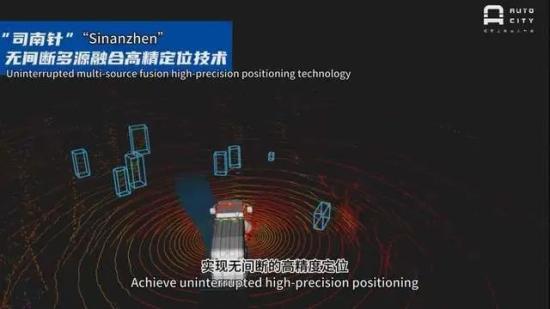
高精度定位技术
环卫机器人通常使用惯性导航系统和环境地图等技术,以实时了解自身的位置和方向。而无人驾驶环卫车则更多地依赖于全球卫星导航系统(如GPS)的定位技术,以获取更高的精度和定位准确度。在无人驾驶领域,城市之光无人驾驶根据环境复杂性,推出了涵洞、隧道等低信号或者无信号高精定位方案,能够兼容更多户外场景作业需求。
数据处理和人工智能
环卫机器人和无人驾驶环卫车均需要处理大量的感知数据和环境信息。环卫机器人通常依靠机器学习和计算机视觉等技术,对数据进行分析和识别垃圾、人员等。无人驾驶环卫车则可以利用大数据分析和深度学习等技术,对交通流量、垃圾分布等进行分析,以优化任务调度和路线规划。
算法层面
环卫机器人通常使用感知、定位、规划和控制等技术,通过机器视觉、深度学习和路径规划等算法来感知环境、规划清扫路径和执行清扫任务。
环卫无人驾驶清扫车也使用类似的算法,但相对于机器人来说,驾驶车辆的控制算法更加重要,因为清扫车需要在道路上行驶,遵守交通规则,而不仅仅是在一个封闭的区域内进行清洁任务,而且需要完成更加复杂的开放式路段的场景作业需求。
无法确定哪种技术的含量更高或符合现阶段环卫需求,因为这取决于具体的环卫需求和实施环境,每种技术都有其独特的优势和适用场景。
传感器方面存在什么区别呢?
环卫机器人和无人驾驶环卫车在传感器方面的依赖倾向可能会有所不同。一般而言,环卫机器人更倾向于依赖视觉传感器,而无人驾驶环卫车更倾向于依赖雷达传感器,但具体情况会因产品设计和应用需求而有所差异。

环卫机器人通常处于人行道、小巷等相对封闭的环境中,视觉传感器(如单目摄像头、双目摄像头等)可以提供丰富的环境信息,对于导航、障碍物识别和路径规划等任务具有重要作用。此外,视觉传感器还能提供高分辨率的图像数据,用于目标检测、图像识别等任务,进一步提高机器人的自主性和工作效率。
相反,无人驾驶环卫车通常在城市道路和交通环境中行驶,要求高速行驶、避开动态障碍物,并确保安全。在这种情况下,雷达传感器具有较大的优势。雷达传感器可以提供精确的距离和速度信息,不受光照和天气条件的限制,能够有效检测周围的车辆、行人和障碍物,并进行相应的规避和决策。
需要注意的是,现代的环卫机器人和无人驾驶环卫车往往会综合多种传感器,如激光雷达、摄像头、超声波传感器和惯性导航传感器等。由于机器人的工作环境相对来说比较简单,而且迫于成本压力,一般采用单线激光雷达,用于定位和检测周边障碍物。自动驾驶汽车一般采用32线或64线的三维激光雷达置于车顶,完成对车辆四周较远物体的检测分类和跟踪。 另外,在车灯或者保险杠附近的位置还需要安装4线和8线激光雷达,主要对车顶三维激光雷达进行补盲,对近距离的车辆、行人以及地线、马路牙、路肩、路栏等进行识别。这些传感器的综合应用可以提供更全面、准确的环境感知,自主操作和安全性能提供支持。因此,在具体应用中,厂家会根据需求进行合理的传感器配置和使用策略。
在定位方面,机器人主要依赖什么?无人驾驶环卫车又依赖什么?谁更精准?
对于机器人来说,定位的精准度通常取决于应用场景和使用的定位技术。在室内环境下,机器人可以通过结合惯性导航、视觉定位和里程计等技术来实现较高的精准定位。
而无人驾驶环卫车通常需要在复杂城市道路和环境中进行定位,这要求更高的定位精度。无人驾驶环卫车通常结合了多种定位技术,如GPS、惯性导航、激光雷达和视觉传感器等,通过融合和滤波算法来提高定位的精确度和鲁棒性。
总的来说,在定位的精准度方面,无人驾驶环卫车往往需要更高的要求,因为它们需要在复杂的城市环境中进行高精度的定位和导航。但是,具体的精准度还取决于传感器、算法和系统的整体设计与实施。
结合实际的环卫需求,两者如何选择呢?谁更高效、更智能化呢?
环卫机器人和无人驾驶环卫车在感知技术、导航与控制技术、定位技术以及数据处理和人工智能、算法等方面存在一些差异。根据实际应用需求,可以选择适合的技术组合来实现环卫工作的自动化和智能化,以提高清洁效率和质量,为城市环境创造更加宜居的生活环境。
两者在需求或者功能上或许存在一定的重叠性,但本质上,两者的应用场景需求,存在一定差异化,环卫机器人通常较小型,移动速度较慢,使用电池驱动。它们携带的传感器和设备相对简单,主要用于环境感知和清扫任务。
环卫无人驾驶清扫车更大型,具备较高的移动速度,使用传感器、激光雷达和相机等,实现对道路和交通情况的感知,需要具备较强的导航、控制和决策能力。
总体上,环卫机器人适用于相对封闭的室内环境,主要解决清扫和擦洗等任务,而环卫无人驾驶清扫车则适用于城市环境中的道路和公共区域,除了清扫任务外,还需要处理复杂的交通情况。它们的技术和算法侧重点略有差异,以适应不同的场景和任务需求。






水平整体站")














