



йҡҸзқҖжҲ‘еӣҪе·ҘдёҡеҢ–зҡ„дёҚж–ӯиҝӣжӯҘпјҢе·ҘдёҡиҮӘеҠЁеҢ–зЁӢеәҰдёҚж–ӯзҡ„жҸҗй«ҳпјҢдәә们еҜ№е®үе…Ёзҡ„иҰҒжұӮе°ұи¶ҠжқҘи¶Ҡй«ҳдәҶгҖӮйӮЈд№ҲиҰҒжұӮи®ҫеӨҮзҡ„е®үе…ЁиҝҗиЎҢиҝ«еңЁзңүзқ«гҖӮдёәдәҶи§ЈеҶіи®ҫеӨҮе®үе…ЁиҝҗиЎҢдәә们еҜ№и®ҫеӨҮзҡ„дҝқжҠӨиЈ…зҪ®иҰҒжұӮе°ұи¶ҠжқҘи¶Ҡй«ҳдәҶгҖӮеҗ„з§ҚеҠҹиғҪзҡ„йҷҗдҪҚдҝқжҠӨејҖе…іеңЁи®ҫеӨҮдёӯзӣёз»§еҮәзҺ°гҖӮеңЁжҲ‘е…¬еҸёеІёжЎҘдёҠеҗ„зұ»йҷҗдҪҚдҝқжҠӨејҖе…іеӨҡиҫҫеҚҒеҮ з§ҚгҖӮ
еІёжЎҘзҡ„ж•ҙдҪ“жңәжһ„зҡ„з®Җд»Ӣ
еІёжЎҘеӨ–еҪўе°әеҜёеәһеӨ§пјҢдҪңдёҡе·ҘеҶөдёҘй…·пјҢиө·еҠЁгҖҒеҲ¶еҠЁйў‘з№ҒпјҢеҶІеҮ»еӨ§гҖӮиЈ…еҚёйӣҶиЈ…з®ұиҰҒжұӮе®ҡдҪҚзІҫзЎ®пјҢй«ҳйҖҹй«ҳж•ҲгҖӮиҝҷдәӣйғҪиҰҒдҫқиө–и®ҫи®ЎиүҜеҘҪзҡ„е·ҘдҪңжңәжһ„е’ҢзҺ°д»Јз”өжҺ§зі»з»ҹгҖӮзҺ°д»ЈеҢ–зҡ„з”өжҺ§зі»з»ҹз”ЁжқҘдҝқиҜҒеҗ„дёӘжңәжһ„зҡ„зӣёдә’й…ҚеҗҲе’Ңдә’зӣёиҒ”й”ҒпјҢжҳҜи®ҫеӨҮе®үе…ЁиҝҗиЎҢзҡ„дҝқиҜҒгҖӮеІёжЎҘзҡ„еӨ–и§ӮеҰӮдёӢеӣҫпјҡ
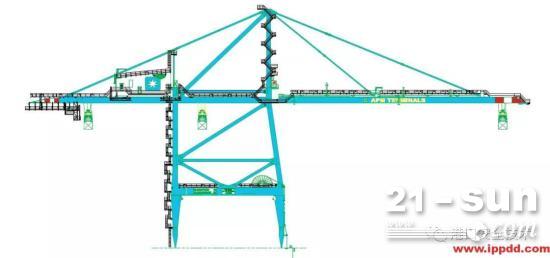
еІёжЎҘдё»иҰҒжңүеӣӣеӨ§й©ұеҠЁжңәжһ„пјҢдёәдё»иө·еҚҮжңәжһ„гҖҒеүҚеӨ§жўҒдҝҜд»°жңәжһ„гҖҒе°ҸиҪҰзүөеј•жңәжһ„гҖҒеӨ§иҪҰиЎҢиө°жңәжһ„гҖӮеҗ„жңәжһ„е®ҢжҲҗеҗ„иҮӘзҡ„д»»еҠЎпјҢиҖҢеҗ„жңәжһ„еҸҲзӣёдә’иҒ”зі»гҖӮ
2пјҺ1гҖҒиө·еҚҮжңәжһ„
дё»иө·еҚҮжңәжһ„е®үиЈ…еңЁжңәеҷЁжҲҝеҶ…гҖӮе®ғз”ұдёӨеҸ°дәӨжөҒеҸҳйў‘з”өжңәй©ұеҠЁпјҢз”өжңәйҖҡиҝҮжў…иҠұеһӢеј№жҖ§иҒ”иҪҙеҷЁпјҲй«ҳйҖҹиҒ”иҪҙеҷЁпјүдёҺеҮҸйҖҹз®ұиҫ“е…ҘиҪҙзӣёиҝһгҖӮдёӨдёӘй’ўдёқз»іеҚ·зӯ’йҖҡиҝҮдёӨдёӘйҪҝеҪўеҚ·зӯ’иҒ”иҪҙеҷЁпјҲдҪҺйҖҹиҒ”иҪҙеҷЁпјүдёҺеҮҸйҖҹз®ұиҫ“еҮәиҪҙзӣёиҝһгҖӮй«ҳйҖҹиҒ”иҪҙеҷЁе’ҢеҚ·зӯ’иҒ”иҪҙеҷЁе°Ҷз”өжңәдә§з”ҹзҡ„й©ұеҠЁеҠӣзҹ©з»ҸеҮҸйҖҹз®ұж”ҫеӨ§еҗҺдј йҖ’еҲ°еҚ·зӯ’дёҠпјҢйҖҡиҝҮй’ўдёқз»ізј з»•зі»з»ҹеҸҠжҸҗеҚҮзі»з»ҹпјҲеҗҠе…·жҲ–еҗҠй’©жЁӘжўҒпјүжҸҗеҚҮжҲ–дёӢйҷҚиҙ§зү©гҖӮ
2пјҺ2гҖҒеүҚеӨ§жўҒдҝҜд»°жңәжһ„
еүҚеӨ§жўҒдҝҜд»°жңәжһ„е®үиЈ…еңЁжңәеҷЁжҲҝдёӯгҖӮе®ғз”ұдёҖеҸ°дәӨжөҒеҸҳйў‘з”өеҠЁжңәй©ұеҠЁпјҢз”өеҠЁжңәйҖҡиҝҮжў…иҠұеһӢеј№жҖ§иҒ”иҪҙеҷЁпјҲй«ҳйҖҹиҒ”иҪҙеҷЁпјүдёҺеҮҸйҖҹз®ұиҫ“е…ҘиҪҙзӣёиҝһгҖӮй’ўдёқз»іеҚ·зӯ’йҖҡиҝҮйҪҝеҪўеҚ·зӯ’иҒ”иҪҙеҷЁпјҲдҪҺйҖҹиҒ”иҪҙеҷЁпјүдёҺеҮҸйҖҹз®ұиҫ“еҮәиҪҙзӣёиҝһгҖӮй«ҳйҖҹиҒ”иҪҙеҷЁе’ҢеҚ·зӯ’иҒ”иҪҙеҷЁе°Ҷз”өеҠЁжңәдә§з”ҹзҡ„й©ұеҠЁеҠӣзҹ©з»ҸеҮҸйҖҹз®ұж”ҫеӨ§еҗҺдј йҖ’еҲ°еҚ·зӯ’дёҠпјҢйҖҡиҝҮдҝҜд»°й’ўдёқз»ізј з»•зі»з»ҹдҪҝеүҚеӨ§жўҒиө·еҚҮжҲ–иҖ…дёӢйҷҚгҖӮдёҖиҲ¬еІёжЎҘзҡ„еӨ§жўҒдҝҜд»°еҸӘи®ҫдёӨдёӘдҪҚзҪ®пјҢеҚіж°ҙе№ідҪҚзҪ®пјҲе·ҘдҪңдҪҚзҪ®пјүе’ҢеҚҮеҲ°80еәҰйЎ¶з«Ҝзҡ„йқһе·ҘдҪңдҪҚзҪ®гҖӮ
2.3гҖҒдё»е°ҸиҪҰзүөеј•жңәжһ„
дё»е°ҸиҪҰзүөеј•жңәжһ„еёғзҪ®еңЁжңәеҷЁжҲҝдёӯгҖӮе®ғз”ұдёҖеҸ°дәӨжөҒеҸҳйў‘з”өеҠЁжңәй©ұеҠЁпјҢз”өжңәйҖҡиҝҮжў…иҠұеһӢеј№жҖ§иҒ”иҪҙеҷЁпјҲй«ҳйҖҹиҒ”иҪҙеҷЁпјүдёҺеҮҸйҖҹз®ұиҫ“е…ҘиҪҙзӣёиҝһгҖӮй’ўдёқз»іеҚ·зӯ’йҖҡиҝҮйҪҝеҪўеҚ·зӯ’иҒ”иҪҙеҷЁпјҲдҪҺйҖҹиҒ”иҪҙеҷЁпјүдёҺеҮҸйҖҹз®ұиҫ“еҮәиҪҙзӣёиҝһгҖӮй«ҳйҖҹиҒ”иҪҙеҷЁе’ҢеҚ·зӯ’иҒ”иҪҙеҷЁе°Ҷз”өжңәдә§з”ҹзҡ„й©ұеҠЁеҠӣзҹ©з»ҸеҮҸйҖҹз®ұж”ҫеӨ§еҗҺдј йҖ’еҲ°еҚ·зӯ’дёҠпјҢд»ҺиҖҢдҪҝе°ҸиҪҰйҖҡиҝҮй’ўдёқз»ізүөеј•еҗ‘еүҚпјҲжө·дҫ§пјүжҲ–еҗ‘еҗҺпјҲйҷҶдҫ§пјүиҝҗиЎҢгҖӮ
2.4гҖҒеӨ§иҪҰиЎҢиө°жңәжһ„
еӨ§иҪҰиЎҢиө°жңәжһ„й©ұеҠЁеІёжЎҘжІҝзқҖеӨ§иҪҰиҪЁйҒ“иЎҢиө°гҖӮиө·йҮҚжңәжҜҸи§’й…Қ8дёӘиҪ®еӯҗпјҢе…¶дёӯдёҖеҚҠжҳҜй©ұеҠЁиҪ®пјҢжҜҸеҘ—й©ұеҠЁиЈ…зҪ®й©ұеҠЁдёҖдёӘиҪҰиҪ®гҖӮйҮҮз”Ё16дёӘдәӨжөҒеҸҳйў‘з”өжңәе’ҢдёӨдёӘеҸҳйў‘еҷЁпјҢдёҖдёӘз”ЁдәҺй©ұеҠЁжө·дҫ§з”өжңәпјҢеҸҰдёҖдёӘй©ұеҠЁйҷҶдҫ§з”өжңәпјҢйҖҡиҝҮдҪҚдәҺжө·йҷҶдҫ§жңҖе·Ұз«Ҝз”өеҠЁжңәдёҠзҡ„и„үеҶІзј–з ҒеҷЁжҺ§еҲ¶дёӨиҖ…йҖҹеәҰзҡ„еҚҸи°ғгҖӮз”өеҠЁжңәд»Һжө·дҫ§зҡ„еҸіиҫ№ејҖе§ӢеҸҚж—¶й’Ҳз”ұ1еҸ·зј–еҸ·еҲ°16еҸ·пјҢеӣ иҖҢ第16еҸ·з”өеҠЁжңәе°ұдҪҚдәҺйҷҶдҫ§еҸіиҫ№гҖӮдёәдәҶйҳІжӯўиө·йҮҚжңәиў«жҡҙйЈҺпјҲйқһе·ҘдҪңйЈҺпјүеҗ№еҠЁпјҢеңЁжө·дҫ§е’ҢйҷҶдҫ§дёӢжЁӘжўҒдёӢи®ҫзҪ®дәҶдёӨз»„й”ҡе®ҡй”ҖгҖӮйҷӨдәҶеңЁй«ҳйҖҹиҪҙдёҠе®үиЈ…дәҶеҲ¶еҠЁеҷЁеӨ–пјҢжҜҸдёӘиў«еҠЁиҪ®дёҠиҝҳе®үиЈ…дәҶж¶ІеҺӢиҪ®иҫ№еҲ¶еҠЁеҷЁжқҘйҳІжӯўиө·йҮҚжңәеңЁе·ҘдҪңж—¶иў«зӘҒеҸ‘йҳөйЈҺеҗ№еҠЁгҖӮ
з”өеҠЁжңәдә§з”ҹзҡ„й©ұеҠЁеҠӣйҖҡиҝҮеј№жҖ§жў…иҠұиҒ”иҪҙеҷЁе’ҢйҪҝиҪ®еҮҸйҖҹеҷЁдј йҖ’з»ҷй©ұеҠЁиҪҰиҪ®гҖӮеӨ§иҪҰзҡ„иЎҢиҝӣж–№еҗ‘еҸҜд»ҘйҖҡиҝҮж”№еҸҳз”өеҠЁжңәзҡ„иҪ¬зҹ©ж–№еҗ‘жқҘж”№еҸҳгҖӮжҜҸдёӘй©ұеҠЁиЈ…зҪ®йғҪи®ҫзҪ®дәҶй«ҳйҖҹиҪҙзӣҳејҸжҺЁжқҶеҲ¶еҠЁеҷЁпјҢе…ұ16дёӘй«ҳйҖҹиҪҙеҲ¶еҠЁеҷЁи¶ід»ҘеңЁ25m/secйЈҺйҖҹж—¶еҲ№еҒңеӨ§иҪҰгҖӮй«ҳйҖҹиҪҙеҲ¶еҠЁеҷЁе’ҢжҜҸдёӘд»ҺеҠЁиҪ®дёҠе®үиЈ…зҡ„иҪ®иҫ№еҲ¶еҠЁеҷЁе…ұеҗҢе·ҘдҪңпјҢи¶ід»ҘжҠөжҠ—35m/secйЈҺйҖҹзҡ„йқһе·ҘдҪңйЈҺгҖӮдҪҶжҳҜеҰӮжһңйў„жөӢйЈҺйҖҹи¶…иҝҮ35m/secпјҢеә”жӯЈзЎ®дҪҝз”Ёй”ҡе®ҡе’Ңзі»еӣәиЈ…зҪ®гҖӮ
3гҖҒиө·еҚҮжһ„дҝқжҠӨеҠҹиғҪд»Ӣз»Қ
еІёжЎҘзҡ„иө·еҚҮжңәжһ„еңЁж•ҙеҸ°и®ҫеӨҮдёӯиө·еҲ°е…ій”®зҡ„дҪңз”ЁпјҢжҳҜи®ҫеӨҮиҝҗиЎҢзҡ„е…ій”®гҖӮеҗ„зұ»иҒ”й”ҒиЈ…зҪ®е’ҢдҝқжҠӨжңҖеӨҡгҖҒжңҖеӨҚжқӮгҖҒиҰҒжұӮжңҖй«ҳпјҢжҳҜж•ҙжңәе®үе…ЁиҝҗиЎҢе‘Ҫи„үгҖӮ
3.1гҖҒдё»иө·еҚҮиҒ”й”ҒиЈ…зҪ®
3.1.1гҖҒиө·еҚҮз”өжңәи¶…йҖҹдҝқжҠӨ
йҷҗдҪҚејҖе…іе®үиЈ…еңЁдёҖдёӘеҚ·зӯ’жң«з«ҜпјҢжҳҜиө·еҚҮжңәжһ„зҡ„еӨ–йғЁи¶…йҖҹдҝқжҠӨиЈ…зҪ®гҖӮи¶…йҖҹж—¶иҜҘејҖе…іе°Ҷжү§иЎҢзҙ§еҒңж“ҚдҪңгҖӮеҜ№еә”з”өеҠЁжңәжңҖеӨ§йҖҹеәҰ110пј…гҖӮдёҖж—Ұе®ғиў«жҝҖжҙ»пјҢе°ұеҝ…йЎ»йҮҮеҸ–жүӢеҠЁеӨҚдҪҚжүҚиғҪ继з»ӯж“ҚдҪңеІёжЎҘгҖӮеҸҰеӨ–д№ҹеҸҜд»Ҙз”ұдҪҚдәҺз”өеҠЁжңәжң«з«Ҝзҡ„еўһйҮҸеһӢзј–з ҒеҷЁеҗ‘PLCжҸҗдҫӣз”өжңәе®һж—¶иҪ¬йҖҹзҡ„дҝЎеҸ·пјҢз”ұPLCеҲӨж–ӯз”өеҠЁжңәжҳҜеҗҰи¶…йҖҹгҖӮ
3.1.2гҖҒй«ҳйҖҹиҪҙеҲ¶еҠЁеҷЁйҷҗдҪҚејҖе…і
дёӨдёӘиө·еҚҮеҲ¶еҠЁеҷЁйғҪжҳҜз”ұдёҖдёӘеҲ¶еҠЁеҷЁйҮҠж”ҫйҷҗдҪҚејҖе…іпјҲеёёејҖи§ҰзӮ№пјүзӣ‘жөӢгҖӮеңЁжІЎжңүиө·еҚҮжүӢжҹ„е‘Ҫд»Өзҡ„жғ…еҶөдёӢпјҢжҝҖжҙ»е…¶дёӯд»»дҪ•дёҖдёӘйҷҗдҪҚејҖе…іпјҢйғҪдјҡзҰҒжӯўиө·еҚҮеҠЁдҪңгҖӮзӣёеҸҚеңЁжңүиө·еҚҮжүӢжҹ„е‘Ҫд»Өзҡ„жғ…еҶөдёӢпјҢе…¶дёӯд»»дҪ•дёҖдёӘйҷҗдҪҚејҖе…іж— дҝЎеҸ·д№ҹе°Ҷдјҡз»Ҳжӯўиө·еҚҮдҪңдёҡ并жҠҘеҮәж•…йҡңгҖӮ
3.1.3гҖҒдҪҺйҖҹеҲ¶еҠЁеҷЁйҷҗдҪҚејҖе…і
дёӨдёӘдҪҺйҖҹеҲ¶еҠЁеҷЁпјҲд№ҹеҸ«еӨ№иҪ®еҷЁпјүйғҪжҳҜз”ұдёҖдёӘеҲ¶еҠЁеҷЁйҮҠж”ҫйҷҗдҪҚејҖе…іпјҲеёёејҖи§ҰзӮ№пјүзӣ‘жөӢгҖӮеңЁжІЎжңүиө·еҚҮйҖүжӢ©е‘Ҫд»Өзҡ„жғ…еҶөдёӢпјҢжҝҖжҙ»е…¶дёӯд»»дҪ•дёҖдёӘйҷҗдҪҚејҖе…іпјҢйғҪдјҡзҰҒжӯўиө·еҚҮеҠЁдҪңгҖӮеҗҢзҗҶеңЁжңүиө·еҚҮйҖүжӢ©е‘Ҫд»Өж—¶еҸӘиҰҒд»»дҪ•дёҖдёӘдҝЎеҸ·жЈҖжөӢдёҚеҲ°е°ҶеҒңжӯўиө·еҚҮдҪңдёҡгҖӮжӣҙйҮҚиҰҒзҡ„жҳҜиҜҘдҝЎеҸ·еҰӮдёҚжӯЈеёёй«ҳйҖҹеҲ¶еҠЁеҷЁжҳҜз»қеҜ№дёҚе…Ғи®ёжү“ејҖз»ҷдәҲи®ҫеӨҮиҝҗиЎҢгҖӮ
3.1.4гҖҒз”өеҠЁжңәжё©жҺ§ејҖе…і
дёӨеҸ°иө·еҚҮз”өеҠЁжңәйғҪжңүдёҖдёӘеҶ…зҪ®зҡ„жё©жҺ§ејҖе…іпјҲеёёй—ӯи§ҰзӮ№пјүгҖӮиҜҘејҖе…іжҝҖжҙ»иЎЁжҳҺз”өеҠЁжңәжё©еәҰеӨ„дәҺдёҚжӯЈеёёзҠ¶жҖҒпјҢе°ҶзҰҒжӯўиө·еҚҮ继з»ӯеҠЁдҪңгҖӮ
3.1.5гҖҒз§°йҮҚзі»з»ҹ
з§°йҮҚзі»з»ҹжҸҗдҫӣдәҶиө·еҚҮзҡ„иҚ·иҪҪжҳҫзӨәе’Ңи¶…иҪҪдҝқжҠӨгҖӮеӣӣдёӘйҮҚйҮҸдј ж„ҹеҷЁеҲҶеҲ«иў«е®үиЈ…еңЁеүҚеӨ§жўҒз«ҜйғЁпјҢе®ғ们иғҪеҲҶеҲ«жөӢеҮәжҜҸж №й’ўдёқз»іеј еҠӣпјҢ并з”ұPLCпјҲеҸҜзј–зЁӢйҖ»иҫ‘жҺ§еҲ¶еҷЁпјүеҸҠCMSпјҲиө·йҮҚжңәз®ЎзҗҶзі»з»ҹпјү计算并记еҪ•жүҖеҗҠиҪҪиҚ·еҸҠиҪҪиҚ·еҒҸеҝғи·қзӯүдҝЎжҒҜпјҢи®©ж“ҚдҪңдәәе‘ҳдёҖзӣ®дәҶ然гҖӮеҪ“иө·йҮҚз¬ҰеҗҲи¶…иҪҪжҲ–еҒҸиҪҪж—¶з»ҷеҮәзӣёеә”зҡ„еЈ°е…үжҠҘиӯҰгҖӮ
3.1.6гҖҒйҳІжҢӮиҲұзі»з»ҹпјҲиҜҘзі»з»ҹ1-3еҸ·еІёжЎҘжңүжүҖеҢәеҲ«дҪҶеҠҹиғҪдёҖж ·пјү
еҪ“еҸ‘з”ҹжҢӮиҲұж—¶пјҢж¶ІеҺӢзі»з»ҹе°ҶдҪҝеҸ‘з”ҹжҢӮиҲұзҡ„жІ№зјёжі„еҺӢпјҢеҗҢж—¶е®үиЈ…еңЁжҢӮиҲұж¶ІеҺӢжІ№зјёдёҠзҡ„еҺӢеҠӣејҖе…іе’Ңз”өзі»з»ҹзҡ„и¶…иҙҹиҚ·дј ж„ҹеҷЁеқҮеҗ‘й©ұеҠЁеҷЁе’ҢPLCйҖҒеҮәдҝЎеҸ·пјҢзҙ§жҖҘеҒңжӯўиө·еҚҮдёҠеҚҮпјҢиҝҷж—¶йҳІжҢӮиҲұжІ№зјёеҸ‘з”ҹеҠЁдҪңпјҢеҗёж”¶жңәжў°зі»з»ҹеҶ…жғҜжҖ§иғҪйҮҸпјҢж•ҙдёӘжҢӮиҲұдҝқжҠӨеҠЁдҪңеңЁдёҚеҲ°дёҖз§’ж—¶й—ҙеҶ…е®ҢжҲҗгҖӮеңЁз¬¬дёҖж¬ЎеӨҚдҪҚиө·йҮҚжңәжҺ§еҲ¶еҗҺпјҢжүҚе…Ғи®ёиө·еҚҮж…ўйҖҹдёӢйҷҚжқҘйҮҠж”ҫй’ўдёқз»ідёҠзҡ„иҪҪиҚ·пјҢзӣҙеҲ°жҢӮиҲұж•…йҡңжҺ’йҷӨеҗҺжүҚе…Ғи®ёжӯЈеёёиө·еҚҮж“ҚдҪңгҖӮ
3.1.7гҖҒеүҚеӨ§жўҒиҒ”й”Ғ
еҰӮжһңеүҚеӨ§жўҒжІЎжңүе®Ңе…ЁеӨ„дәҺж°ҙе№ідҪҚзҪ®пјҢе°ҶдёҚиғҪиҝӣиЎҢиө·еҚҮж“ҚдҪңгҖӮеүҚеӨ§жўҒеӨ„дәҺд»°иө·дҪҚзҪ®ж—¶пјҢиө·еҚҮеҠЁдҪңеҸӘиғҪд»ҘдҪҺйҖҹиҝҗиЎҢпјҲеҗҠе…·еҝ…йЎ»з©әиҪҪпјүгҖӮ
3.1.8гҖҒеҗҠе…·зҠ¶жҖҒиҒ”й”ҒпјҲжқҫз»ідҝқжҠӨпјү
еҗҠе…·йЎ¶й”ҖйҷҗдҪҚејҖе…ійғҪеҠЁдҪңж—¶пјҲеҚіиҙ§зү©дёӢйҷҚеҲ°дҪҚпјүпјҢзҰҒжӯўиҝӣдёҖжӯҘйҷҚдҪҺеҗҠе…·пјҢе®ғе®һйҷ…иө·зқҖжқҫз»ідҝқжҠӨзҡ„дҪңз”ЁпјӣеҸӘжңүеҪ“жүҖжңүеҗҠе…·й”Ғй”ҖйғҪеӨ„дәҺйҮҠж”ҫзҠ¶жҖҒжҲ–йғҪеӨ„дәҺй”Ғзҙ§зҠ¶жҖҒж—¶пјҢжүҚиғҪиҝӣиЎҢиө·еҚҮеҠЁдҪңгҖӮ
3.2гҖҒиө·еҚҮиЎҢзЁӢйҷҗдҪҚ
жӯЈеёёиө·еҚҮз»ҲзӮ№дҪҚзҪ®з”ұз»қеҜ№еҖјзј–з ҒеҷЁжҺ§еҲ¶гҖӮиө·еҚҮиҝҗеҠЁзҡ„йӣ¶дҪҚи®ҫзҪ®еңЁдёҠеҚҮжӯЈеёёз»ҲзӮ№еҒңжӯўдҪҚзҪ®пјҢдҪҶжҳҫзӨәиө·еҚҮй«ҳеәҰзҡ„йӣ¶дҪҚиҝҳжҳҜд»Ҙз ҒеӨҙйқўдёәеҹәеҮҶгҖӮеҜ№иө·еҚҮжһҒйҷҗдҪҚзҪ®зҡ„жҺ§еҲ¶пјҢйҷӨдәҶз»қеҜ№еҖјзј–з ҒеҷЁеӨ–пјҢиҝҳжңүдҪҚдәҺе°ҸиҪҰеә•йғЁзҡ„йҮҚй”ӨйҷҗдҪҚејҖе…іе’Ңиө·еҚҮеҚ·зӯ’жң«з«Ҝзҡ„еҮёиҪ®йҷҗдҪҚејҖе…іпјҢиҝҷз§ҚеҶ—дҪҷи®ҫи®Ўзҡ„ж–№ејҸеҸҜд»ҘжӣҙеҘҪзҡ„жҸҗдҫӣиҝҮиЎҢзЁӢдҝқжҠӨгҖӮ
3.2.1гҖҒдёҠеҚҮжһҒйҷҗеҒңжӯў
з”ұйҮҚй”ӨйҷҗдҪҚејҖе…іе’ҢеҮёиҪ®йҷҗдҪҚејҖе…іе…ұеҗҢжҺ§еҲ¶гҖӮжҝҖжҙ»иҜҘйҷҗдҪҚејҖе…іпјҢз”өеҠЁжңәе°Ҷзҙ§жҖҘеҒңжӯўпјҢ并йҮҚж–°и®ҫзҪ®з»қеҜ№еҖјзј–з ҒеҷЁйӣ¶зӮ№(жё…йӣ¶)гҖӮз”Ёз”өж°”жҲҝйҮҢзҡ„“йҷҗдҪҚж—Ғи·Ҝ”иҮӘеӨҚдҪҚйҖүжӢ©ејҖе…іжүҚиғҪж“ҚдҪңиө·еҚҮжңәжһ„дёӢйҷҚгҖӮпјҲдёҚиғҪдёҠеҚҮпјү
3.2.2гҖҒдёҠеҚҮеҒңжӯўжЈҖжөӢпјҲеҚіеҮёиҪ®з»ҲзӮ№жһҒйҷҗеҒңжӯўпјү
з”ұеўһйҮҸеһӢзј–з ҒеҷЁе’ҢеҮёиҪ®йҷҗдҪҚејҖе…іе…ұеҗҢжҺ§еҲ¶гҖӮеҰӮжһңжӯӨж—¶еўһйҮҸеһӢзј–з ҒеҷЁжІЎжңүжҳҫзӨәиө·еҚҮйҖҹеәҰдёәйӣ¶пјҢйӮЈд№Ҳе°ҶеҗҜеҠЁзҙ§жҖҘеҒңиҪҰгҖӮ
3.2.3гҖҒдёҠеҚҮжӯЈеёёеҒңжӯў
з”ұз»қеҜ№еҖјзј–з ҒеҷЁе’ҢеҮёиҪ®йҷҗдҪҚејҖе…іе…ұеҗҢжҺ§еҲ¶гҖӮжҝҖжҙ»иҜҘејҖе…із”өеҠЁжңәе°ҶжӯЈеёёеҒңжӯўгҖӮжӯӨж—¶еҸҜд»ҘеңЁCMSзі»з»ҹдёӯе°Ҷз»қеҜ№еҖјзј–з ҒеҷЁ“жүӢеҠЁжё…йӣ¶”гҖӮ
3.2.4гҖҒдёҠеҚҮеҮҸйҖҹжЈҖжөӢ
з”ұеўһйҮҸеһӢзј–з ҒеҷЁе’ҢеҮёиҪ®йҷҗдҪҚејҖе…іе…ұеҗҢжҺ§еҲ¶гҖӮеҰӮжһңеңЁеҮёиҪ®йҷҗдҪҚејҖе…ізҡ„дёҠеҚҮеҮҸйҖҹжЈҖжөӢзӮ№еҠЁдҪңж—¶пјҢеўһйҮҸеһӢзј–з ҒеҷЁеҸҚжҳ иө·еҚҮйҖҹеәҰеҖјжІЎжңүеҮҸе°ҸеҲ°и®ҫе®ҡиҢғеӣҙеҖјпјҢйӮЈд№Ҳе°ҶеҗҜеҠЁзҙ§жҖҘеҒңиҪҰгҖӮ
3.2.5гҖҒдёҠеҚҮжҷәиғҪеҮҸйҖҹ
з”ұеҮёиҪ®йҷҗдҪҚејҖе…іе’ҢPLCзҡ„зЁӢеәҸе…ұеҗҢжҺ§еҲ¶гҖӮеҸҜд»Ҙж №жҚ®е®һйҷ…йҖҹеәҰзҡ„еӨ§е°Ҹи®ҫе®ҡеҮҸйҖҹи·қзҰ»пјҢзӣ®зҡ„жҳҜеҲ°иҫҫжҢҮе®ҡдҪҚзҪ®ж—¶иө·еҚҮйҖҹеәҰеқҮеҮҸе°Ҹдёәи®ҫе®ҡеҖјгҖӮ
3.2.6гҖҒдёӢйҷҚжҷәиғҪеҮҸйҖҹ
еңЁйҷҶдҫ§пјҢд»Ҙең°йқўдёәж ҮеҮҶеҸҜи®ҫи®ЎеҮҸйҖҹи·қзҰ»пјҢеҗҢдёҠеҚҮжҷәиғҪеҮҸйҖҹзұ»дјјгҖӮ
3.2.7гҖҒдёӢйҷҚйһҚжўҒдҝқжҠӨеҒңжӯў
з”ұз»қеҜ№еҖјзј–з ҒеҷЁе’ҢеҮёиҪ®йҷҗдҪҚејҖе…іе…ұеҗҢжҺ§еҲ¶гҖӮеҪ“е°ҸиҪҰеңЁжө·йҷҶдҫ§дёӢжЁӘжўҒжӯЈдёҠж–№зҡ„ж—¶еҖҷпјҢеҗҠе…·дёӢйҷҚе°ҶжҺ§еҲ¶еңЁжҢҮе®ҡй«ҳеәҰгҖӮиҝҷж ·и®ҫи®Ўзҡ„зӣ®зҡ„жҳҜзЎ®дҝқеҗҠе…·еҸҜд»Ҙе®үе…Ёи¶ҠиҝҮжө·йҷҶдҫ§й—ЁжЎҶдёӢжЁӘжўҒдёҠиЎЁйқўгҖӮе…·дҪ“й«ҳеәҰеҖјеҸ–еҶідәҺеҗҠе…·дёӢжҳҜеҗҰеёҰйӣҶиЈ…з®ұжҲ–иҖ…жүҖеёҰйӣҶиЈ…з®ұй«ҳеәҰгҖӮ
3.2.8гҖҒдёӢйҷҚеҮҸйҖҹжЈҖжөӢпјҲз ҒеӨҙдёҠж–№пјү
е’ҢдёҠеҚҮеҮҸйҖҹжЈҖжөӢзұ»дјјгҖӮ
3.2.9гҖҒдёӢйҷҚжӯЈеёёеҒңжӯў
е’ҢдёҠеҚҮжӯЈеёёеҒңжӯўзұ»дјјгҖӮ
3.2.10гҖҒдёӢйҷҚжһҒйҷҗжЈҖжөӢ
з”ұз»қеҜ№еҖјзј–з ҒеҷЁе’ҢеҮёиҪ®йҷҗдҪҚејҖе…іе…ұеҗҢжҺ§еҲ¶гҖӮжҳҜеҜ№иҝҮдёӢйҷҚпјҲеңЁиҲ№иҲұеҶ…пјүе·ҘеҶөзҡ„дҝқжҠӨгҖӮ
3.3гҖҒеҗҠе…·еҖҫиҪ¬е’ҢжҢӮиҲұдҝқжҠӨиЈ…зҪ®пјҲжӯӨзі»з»ҹд»Ҙ5гҖҒ6гҖҒ7еҸ·еІёжЎҘдёәеҹәзЎҖе…¶дҪҷеҺҹзҗҶзӣёеҗҢпјү
иҜҘеҠҹиғҪз”ұдҪҚдәҺеҗҺеӨ§жўҒе°ҫйғЁзҡ„еӨҡеҠҹиғҪж¶ІеҺӢзі»з»ҹжү§иЎҢгҖӮиҜҘж¶ІеҺӢзі»з»ҹз”ұеӣӣдёӘж¶ІеҺӢжІ№зјёеҸҠж¶ІеҺӢжіөз«ҷйҳҖз»„зӯүз»„жҲҗгҖӮж¶ІеҺӢжІ№зјёдёҺдё»иө·еҚҮй’ўдёқз»іж”№еҗ‘ж»‘иҪ®зӣёиҝһгҖӮ
дё»иө·еҚҮй’ўдёқз»ійҖҡиҝҮеӨҡеҠҹиғҪж¶ІеҺӢзі»з»ҹеҸҜд»Ҙе®һзҺ°еҗҠе…·зҡ„е®ҡдҪҚпјҲеҖҫиҪ¬пјүе’ҢжҢӮиҲұдҝқжҠӨгҖӮ
еҗҠе…·зҡ„еҖҫиҪ¬йҖҡиҝҮж”№еҸҳж¶ІеҺӢзјёзҡ„дҪҚзҪ®е®һзҺ°пјҢдјёй•ҝжҲ–зј©зҹӯй’ўдёқз»ій•ҝеәҰжқҘи°ғж•ҙйӣҶиЈ…з®ұз»•3дёӘзӣёдә’еһӮзӣҙзҡ„з«ӢдәӨиҪҙзәҝзҡ„иҪ¬и§’гҖӮ
жҢӮиҲұдҝқжҠӨеҠҹиғҪжҳҜеңЁеҸ‘з”ҹжҢӮиҲұзҙ§еҒңеҗҺе°ҶеӨ„дәҺй«ҳйҖҹиҪ¬еҠЁзҡ„иө·еҚҮжңәжһ„зі»з»ҹзҡ„еҠЁиғҪйҖҡиҝҮжң¬иЈ…зҪ®зҡ„ж¶ІеҺӢзі»з»ҹе°Ҷе®ғиҪ¬еҢ–дёәзғӯиғҪйҮҠж”ҫжҺүгҖӮиҝҷж ·е°ұиғҪйҳІжӯўз ҙеқҸжҖ§дәӢж•…зҡ„еҸ‘з”ҹпјҢиҜёеҰӮй’ўдёқз»іжӢүж–ӯгҖҒеІёжЎҘз»“жһ„жҚҹеқҸз”ҡиҮіеҖҫиҰҶжҲ–еҖ’еЎҢзӯүгҖӮ
ж¶ІеҺӢзјёзҡ„дҪҚ移з”ұи®ҫдәҺжҜҸдёӘжІ№зјёеҶ…зҡ„зәҝжҖ§дҪҚз§»дј ж„ҹеҷЁзӣ‘жөӢгҖӮжҜҸдёӘж¶ІеҺӢзјёдҪҚз§»дј ж„ҹеҷЁзҡ„иҫ“еҮәеҖјдёҺе…¶1600mmзҡ„иЎҢзЁӢе®Ңе…ЁжҲҗжҜ”дҫӢгҖӮжІ№зјёе·ҘдҪңжңҖе°ҸдҪҚзҪ®ж—¶пјҢжҜҸдёӘж¶ІеҺӢзјёиҮіе°‘дјёеҮә800mmгҖӮеҚіжІ№зјёзҡ„0mm~800mmиЎҢзЁӢз”ЁдәҺжҢӮиҲұдҝқжҠӨпјҢ800~1600mmз”ЁдәҺеҗҠе…·зҡ„еҖҫиҪ¬еҠЁдҪңд»ҘеҸҠй’ўдёқз»ій•ҝзҹӯзҡ„и°ғж•ҙгҖӮ
3.3.1гҖҒеҗҠе…·еҖҫиҪ¬
йҖҡиҝҮеӨҡеҠҹиғҪж¶ІеҺӢзі»з»ҹдёӯж¶ІеҺӢзјёдёҚеҗҢж–№еҗ‘иҝҗеҠЁзҡ„з»„еҗҲпјҢиҜҘиЈ…зҪ®еҸҜд»Ҙи°ғж•ҙеҗҠе…·е·ҰеҸіеҖҫ/ еүҚеҗҺеҖҫ/ж°ҙе№іеӣһиҪ¬зҡ„и§’еәҰгҖӮ
пјҲ1пјүгҖҒе·ҰеҸіеҖҫ
еҗҠе…·з»•еһӮзӣҙдәҺеӨ§иҪҰиҪЁйҒ“зҡ„ж°ҙе№іиҪҙзәҝеҖҫж–ңжҲ–иҪ¬еҠЁгҖӮд»ҺеҸёжңәдҪҚзҪ®зңӢпјҢе·ҰеҸіеҖҫжҳҜжҢҮеҗҠе…·е·ҰеҸідёӨз«Ҝзҡ„еҚҮиө·жҲ–дёӢйҷҚгҖӮ
еҗҠе…·е·ҰеҖҫе’ҢеҗҠе…·еҸіеҖҫзӨәж„Ҹеӣҫ
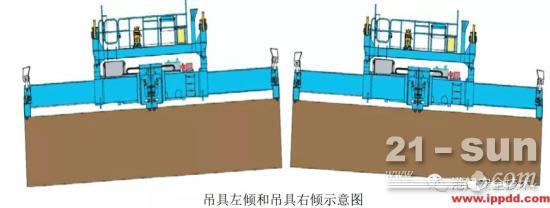
пјҲ2пјүгҖҒеүҚеҗҺеҖҫ
еҗҠе…·з»•е№іиЎҢдәҺеӨ§иҪҰиҪЁйҒ“зҡ„иҪҙзәҝеҖҫж–ңжҲ–иҪ¬еҠЁгҖӮ
еҗҠе…·еүҚеҖҫе’ҢеҗҠе…·еҗҺеҖҫзӨәж„Ҹеӣҫ
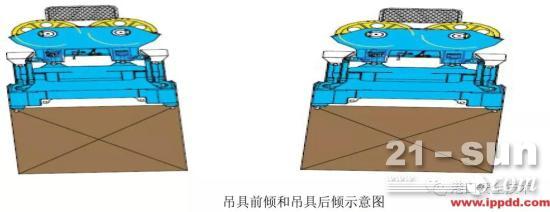
пјҲ3пјүгҖҒж°ҙе№іеӣһиҪ¬
еҗҠе…·з»•й“…еһӮиҪҙзәҝиҪ¬еҠЁгҖӮ

еҗҠе…·е№ійқўе·ҰиҪ¬е’ҢеҗҠе…·е№ійқўеҸіиҪ¬зӨәж„Ҹеӣҫ
еҪ“е·ҰеҸіеҖҫ/ еүҚеҗҺеҖҫ/ж°ҙе№іеӣһиҪ¬еӨ„дәҺжңҖеӨ§и§’еәҰж—¶пјҢжІ№зјёдёҚиғҪиҝӣдёҖжӯҘиҝҗеҠЁгҖӮеңЁжӯӨжғ…еҶөдёӢпјҢеҸҜж“ҚдҪңиҒ”еҠЁеҸ°дёҠзӣёеә”зҡ„еҪ’йӣ¶ејҖе…іе°Ҷе…¶еӣһеӨҚиҮійӣ¶дҪҚгҖӮ
3.2гҖҒжҢӮиҲұдҝқжҠӨеҠҹиғҪ
е…ёеһӢзҡ„жҢӮиҲұе·ҘеҶөеҸ‘з”ҹеңЁеҗҠе…·дёҠеҚҮж—¶жҢӮжҲ–зў°еңЁжҹҗдёӘйҡңзўҚзү©(еҰӮйӣҶиЈ…з®ұиҲ№иҲұеҜјжһ¶еҸҠиҙ§иҲұиҲұзӣ–еҸЈзӯү)гҖӮ
еҪ“жҢӮиҲұеҸ‘з”ҹж—¶пјҢй’ўдёқз»ізҡ„жӢүеҠӣе°Ҷиҝ…йҖҹеўһеӨ§пјҢжҢӮиҲұж¶ІеҺӢжІ№зјёзҡ„еҺӢеҠӣд№ҹзӣёеә”ең°еўһеӨ§гҖӮеҪ“еӣӣдёӘж¶ІеҺӢзјёдёӯд»»дҪ•дёҖдёӘеҺӢеҠӣиҫҫеҲ°еҺӢеҠӣйҳҖйў„и®ҫеҖјж—¶пјҢзӣёеә”еҺӢеҠӣејҖе…іеҠЁдҪңпјҢжҺ§еҲ¶зі»з»ҹе°Ҷзҙ§жҖҘеҒңжӯўиө·еҚҮз”өеҠЁжңәпјҢдёҺжӯӨеҗҢж—¶пјҢжәўжөҒйҳҖе°Ҷжү“ејҖпјҢдҪҝж¶ІеҺӢ缸收缩гҖӮ
жҢӮиҲұеҸ‘з”ҹеҗҺпјҢеҸёжңәе®ӨйҮҢзҡ„жҢӮиҲұжҢҮзӨәзҒҜдә®иө·пјҢеҗҢж—¶дјҡе“Қиө·иӯҰжҠҘеЈ°пјҢиө·йҮҚжңәжҺ§еҲ¶е°Ҷиў«еҲҮж–ӯпјҢжӯӨж—¶еҸӘиғҪж…ўйҖҹж”ҫдёӢиҪҪиҚ·пјҢд»ҘйҮҠж”ҫй’ўдёқз»ізҡ„еј зҙ§еҠӣпјҢ并зҰҒжӯўд»»дҪ•иө·еҚҮеҠЁдҪңгҖӮ
иҰҒжё…йҷӨжҢӮиҲұзҠ¶жҖҒпјҢеҸёжңәйҰ–е…Ҳеҝ…йЎ»йҮҚеҗҜиө·йҮҚжңәжҺ§еҲ¶пјҢж”ҫдёӢ并еҚёжҺүиҙ§зү©пјҲзҰҒжӯўиө·еҚҮпјҢ然еҗҺжЈҖжҹҘиө·йҮҚжңәзҡ„жҚҹдјӨжғ…еҶөгҖӮдёҖеҲҮе°ұз»ӘеҗҺпјҢж–№иғҪеҗҜеҠЁи®ҫдәҺз”өж°”жҲҝзҡ„еӨҚдҪҚй’ҘеҢҷејҖе…іпјҢдёҖж—ҰеӨҚдҪҚпјҢиө·йҮҚжңәзҡ„жүҖжңүеҠҹиғҪйғҪе°ҶжҒўеӨҚгҖӮ
4гҖҒеҠҹиғҪзҡ„еҲҶзұ»
йҖҡиҝҮеҜ№еҗ„з§ҚиҒ”й”Ғе’ҢдҝқжҠӨзҡ„д»Ӣз»ҚпјҢжҲ‘们иғҪеӨҹжё…жҘҡзҡ„зҹҘйҒ“дёәдәҶдҪҝи®ҫеӨҮиғҪеӨҹеҝ«йҖҹе®үе…Ёзҡ„иҝҗиЎҢпјҢжҲ‘们жҠҠеҗ„зұ»иҝһй”Ғе’ҢдҝқжҠӨеҲҶзұ»пјҡ
4.1гҖҒеҹәжң¬иҒ”й”ҒдҝқжҠӨ
еҹәжң¬зҡ„иҝһй”ҒдҝқжҠӨе°ұжҳҜжЈҖжҹҘжүҖиҝһжҺҘзҡ„еӨ–йғЁи®ҫеӨҮпјҢеҸӘиҰҒи®ҫеӨҮжҳҜжӯЈеёёзҡ„пјҢе°ұеҸҜеңЁзЁӢеәҸйҮҢејәеҲ¶йҖҡж–ӯжҲ–иҖ…е’ҢеҗҢж—¶еҠЁдҪңзҡ„继з”өеҷЁе№¶иҒ”з»ҷдәҲдҪңдёҡгҖӮеҰӮиө·еҚҮй«ҳйҖҹеҲ¶еҠЁеҷЁжү“ејҖжЈҖжөӢйҷҗдҪҚгҖӮжҲ‘们жЈҖжҹҘеҲ¶еҠЁеҷЁжү“ејҖе’Ңе…ій—ӯйғҪеҫҲжӯЈеёёпјҢеӣ дёәиө·еҚҮй«ҳйҖҹеҲ¶еҠЁеҷЁжЈҖжөӢйҷҗдҪҚжңүдёӨдёӘпјҢдёәдәҶдёҚеҪұе“ҚиҲ№жңҹи®ЎеҲ’пјҢеҸҜд»Ҙе’ҢеҸҰдёҖдёӘеҲ¶еҠЁеҷЁжЈҖжөӢйҷҗдҪҚ并иҒ”гҖӮд№ҹеҸҜд»ҘеңЁеҲ¶еҠЁеҷЁжІ№жіөжҺҘи§ҰеҷЁеӨ„еҸ–дҝЎеҸ·зӯүпјҢж–№жі•еҫҲеӨҡеҸҜж №жҚ®е®һйҷ…жғ…еҶөиҖҢе®ҡгҖӮиҝҷе°ұжҳҜеҹәжң¬зҡ„иҒ”й”ҒдҝқжҠӨгҖӮ
еҹәжң¬зҡ„иҒ”й”ҒдҝқжҠӨеҢ…жҢҺжңүпјҡй«ҳйҖҹиҪҙеҲ¶еҠЁеҷЁйҷҗдҪҚејҖе…іпјӣдҪҺйҖҹеҲ¶еҠЁеҷЁйҷҗдҪҚејҖе…іпјӣз”өеҠЁжңәжё©жҺ§ејҖе…іпјӣеҗҠе…·зҠ¶жҖҒиҒ”й”ҒпјҲжқҫз»ідҝқжҠӨпјүпјӣдёҠеҚҮгҖҒдёӢйҷҚеҮҸйҖҹжЈҖжөӢпјӣдёҠеҚҮгҖҒдёӢйҷҚжҷәиғҪеҮҸйҖҹпјӣдёҠеҚҮгҖҒдёӢйҷҚжӯЈеёёеҒңжӯўпјӣеҗҠе…·еҖҫиҪ¬дёӘдҪҚзҪ®жЈҖжөӢйҷҗдҪҚзӯүгҖӮ
4.2гҖҒз»қеҜ№иҒ”й”ҒдҝқжҠӨ
з»қеҜ№зҡ„иҒ”й”ҒдҝқжҠӨе°ұжҳҜеҝ…йЎ»иҰҒж»Ўи¶ізҡ„пјҒе°‘дәҶе…¶дёӯзҡ„д»»дҪ•дёҖйЎ№йғҪеҸҜиғҪйҖ жҲҗи®ҫеӨҮзҡ„жҜҒеқҸжҲ–иҖ…йҮҚеӨ§зҡ„е®үе…ЁдәӢж•…гҖӮеңЁж•…йҡңеӨ„зҗҶдёӯеҝ…йЎ»еҒңжңәжӣҙжҚўжҒўеӨҚеҲ°еҮәеҺӮзҠ¶жҖҒжүҚиғҪе·ҘдҪңзҡ„гҖӮеҰӮеүҚеӨ§жўҒиҒ”й”ҒгҖӮеҰӮжһңеүҚеӨ§жўҒжІЎжңүе®Ңе…ЁеӨ„дәҺж°ҙе№ідҪҚзҪ®ж—¶пјҢиө·еҗҠйҮҚзү©е°ҶдјҡйҖ жҲҗе°ҸиҪҰеҮәзҺ°жәңиҪҰзҡ„зҺ°иұЎпјҢиҪ»иҖ…йҖ жҲҗиҙ§жҚҹпјҢйҮҚиҖ…е°ұж— жі•жғіиұЎгҖӮеүҚеӨ§жўҒж°ҙе№ідҪҚзҪ®жЈҖжөӢйҷҗдҪҚе’Ңзј–з ҒеҷЁйӣ¶еәҰдҪҚзҪ®жҳҜз»қеҜ№дёҚиғҪж”№еҸҳзҡ„пјҢеҸӘжңүеңЁжҒўеӨҚеҗҺжүҚиғҪз»ҷдәҲжӯЈеёёдҪңдёҡгҖӮ
з»қеҜ№иҒ”й”ҒдҝқжҠӨеҢ…жҢҺжңүпјҡиө·еҚҮз”өжңәи¶…йҖҹдҝқжҠӨпјӣз§°йҮҚзі»з»ҹпјӣжҢӮиҲұдҝқжҠӨпјӣеүҚеӨ§жўҒиҒ”й”ҒпјӣдёҠеҚҮгҖҒдёӢйҷҚжһҒйҷҗеҒңжӯўпјӣдёӢйҷҚйһҚжўҒдҝқжҠӨеҒңжӯўпјӣеҗҠе…·еҖҫиҪ¬дҪҚзҪ®жһҒйҷҗдҝқжҠӨйҷҗдҪҚзӯүгҖӮ
5гҖҒз»“и®ә
з»јеҗҲд»ҘдёҠеҜ№еІёжЎҘиө·еҚҮжңәжһ„еҗ„еҠҹиғҪдҝқжҠӨзҡ„иҜҰз»Ҷд»Ӣз»ҚпјҢдҪҝз»ҙдҝ®дәәе‘ҳеҜ№еІёжЎҘзҡ„иө·еҚҮжңәжһ„зҡ„еҗ„зұ»иҒ”й”Ғе’ҢдҝқжҠӨзҡ„еҗ„з§Қе·ҘеҶөйғҪжңүдёҖдёӘзі»з»ҹзҡ„дәҶи§ЈгҖӮжҸҗй«ҳдәҶз»ҙдҝ®дәәе‘ҳеҜ№и®ҫеӨҮжҺ§еҲ¶зі»з»ҹзҡ„зҶҹжӮүзЁӢеәҰпјҢд»ҺиҖҢеңЁд»ҠеҗҺзҡ„з»ҙжҠӨе’Ңдҝқе…»е·ҘдҪңдёӯзҹҘйҒ“дҫ§йҮҚзӮ№пјҢиғҪеӨҹеңЁжҠўдҝ®дёӯеҝ«йҖҹзҡ„жүҫеҲ°ж•…йҡңеҮәеңЁд»Җд№ҲдҪҚзҪ®пјҢиғҪеӨҹеҮҶзЎ®зҡ„еҲӨж–ӯеҮәйңҖдҝ®еӨҚжүҖиҠұиҙ№зҡ„ж—¶й—ҙпјҢдёәдёҚеҪұе“ҚиҲ№жңҹжҸҗдҫӣејәжңүеҠӣзҡ„дҝқиҜҒгҖӮжҸҗй«ҳдәҶз»ҙдҝ®дәәе‘ҳеҜ№и®ҫеӨҮжҺ§еҲ¶зі»з»ҹзҡ„зҶҹжӮүзЁӢеәҰгҖӮ





















