еҺӢе®һе·Ҙең°дёҠдёҖзүҮеҝҷзўҢпјҢдёҖеҸ°еҸ°еҺӢи·Ҝжңәдә•з„¶жңүеәҸпјҢйұјиҙҜиҖҢиЎҢпјҢеҸӘиҰҒжңүеҺӢе®һйңҖжұӮе®ғ们йҡҸж—¶еҸҜд»Ҙиҝӣе…ҘжңҖдҪізҠ¶жҖҒпјҢдёҚзҹҘз–ІеҖҰгҖҒдҝқиҙЁдҝқйҮҸең°е®ҢжҲҗе·ҘдҪңпјҢиҖҢиҝҷдёҖеҲҮд№ҹи®ёдёҚйңҖиҰҒй©ҫ驶е‘ҳзҷ»жңәж“ҚдҪңпјҢеҸ–иҖҢд»Јд№Ӣзҡ„жҳҜж— дәәй©ҫ驶еҺӢи·ҜжңәжҠҖжңҜгҖӮиҝ‘еҮ е№ҙдёҚи®әеңЁиЎҢдёҡеұ•дјҡиҝҳжҳҜдёҖдәӣиҜ•йӘҢеңәең°пјҢз”ҡиҮіеңЁдёҖдәӣж–Ҫе·ҘйЎ№зӣ®дёӯпјҢж— дәәй©ҫ驶еҺӢи·ҜжңәйғҪиЎЁзҺ°еҮәдәҶеӢғеӢғз”ҹжңәгҖӮ
жҢҜеҠЁеҺӢи·ҜжңәдҪңдёәе·ҘзЁӢжңәжў°зҡ„йҮҚиҰҒз»„жҲҗйғЁеҲҶпјҢеңЁеёӮж”ҝе»әи®ҫгҖҒдәӨйҖҡж°ҙеҲ©дёӯеқҮжү®жј”зқҖдёҚеҸҜжҲ–зјәзҡ„и§’иүІ[1-3]пјҢзӣ®еүҚе·Іжңүж”№иЈ…еһӢж— дәәй©ҫ驶жҢҜеҠЁеҺӢи·ҜжңәеңЁеӨ§еққе·ҘзЁӢдёҠжҠ•е…ҘиҜ•з”Ё[4]гҖӮйҡҸзқҖж–°жҠҖжңҜйқ©е‘ҪдёҺй«ҳж–°жҠҖжңҜзҡ„еҸ‘еұ•пјҢеҺӢи·Ҝжңәдә§е“Ғеҗ‘ж— дәәеҢ–ж–№еҗ‘еҸ‘еұ•жҲҗдёәи¶ӢеҠҝгҖӮдёәжӯӨпјҢжң¬ж–Үз»“еҗҲеҺӢи·Ҝжңәжң¬иә«зү№зӮ№з®ҖиҰҒеҲҶжһҗдәҶеҺӢи·Ҝжңәж— дәәй©ҫ驶зҡ„еҠҹиғҪе®һзҺ°ж–№ејҸгҖӮ
дёәдәҶе®һзҺ°еҺӢи·Ҝжңәж— дәәй©ҫ驶пјҢеҹәдәҺеҠҹиғҪеҲҶжһҗжі•пјҢжҲ‘们е…ҲжҖ»з»“дёҖдёӢжҢҜеҠЁеҺӢи·Ҝжңәзҡ„дҪҝз”Ёзү№зӮ№——жҢҜеҠЁгҖҒдҪҺйҖҹгҖҒе…·жңүзўҫеҺӢж–Ҫе·Ҙе·ҘиүәпјҢд»ҘеҸҠеҠҹиғҪжҺ§еҲ¶иҰҒжұӮ——жҢҜеҠЁгҖҒиЎҢиө°гҖҒиҪ¬еҗ‘гҖҒеҲ¶еҠЁе’Ңиҫ…еҠ©жҺ§еҲ¶гҖӮжҢүж— дәәй©ҫ驶и®ҫеӨҮд»ҝдәәзұ»жҺ§еҲ¶иҰҒжұӮпјҢеҺӢи·Ҝжңәе®һзҺ°ж— дәәй©ҫ驶еҠҹиғҪеә”йҮҮз”Ёе·®еҲҶGPSжҠҖжңҜгҖҒи§’дҪҚз§»дј ж„ҹеҷЁгҖҒи¶…еЈ°жіўйӣ·иҫҫе’Ң“IF-THEN”еҶізӯ–зі»з»ҹзӯүгҖӮ
жҢҜеҠЁеҺӢи·ҜжңәдҪҝз”Ёзү№зӮ№е’ҢеҠҹиғҪжҺ§еҲ¶иҰҒжұӮ
дҪңдёәд»ҘеўһеҠ е·ҘдҪңд»ӢиҙЁеҜҶе®һеәҰдёәдё»иҰҒз”ЁйҖ”зҡ„ж–Ҫе·Ҙжңәжў°пјҢжҢҜеҠЁеҺӢи·Ҝжңәе…·жңүд»ҘдёӢдҪҝз”Ёзү№зӮ№гҖӮ
еҲ©з”ЁжҢҜеҠЁе®ҢжҲҗеҺӢе®һ
жҢҜеҠЁеҺӢи·Ҝжңәд»Ҙе…¶еҸ‘еҮәзҡ„жҢҜеҠЁиҪҪиҚ·дҪҝеңҹйў—зІ’еӨ„дәҺй«ҳйў‘жҢҜеҠЁзҠ¶жҖҒпјҢеҗҢж—¶йҖҡиҝҮеҺӢи·Ҝжңәжң¬иә«зҡ„йҮҚйҮҸеҪўжҲҗеҜ№ең°дҪңз”ЁеҠӣпјҢиҝ«дҪҝиҝҷдәӣйў—зІ’йҮҚж–°жҺ’еҲ—иҖҢеҜҶе®һ[5]гҖӮжҢҜеҠЁеҺӢе®һиғҪеҪұе“ҚеҲ°й“әеұӮжӣҙж·ұеӨ„пјҢжҸҗй«ҳеҺӢе®һж•ҲзҺҮгҖӮ
е·ҘдҪңйҖҹеәҰдҪҺ
еҸҢй’ўиҪ®жҢҜеҠЁеҺӢи·ҜжңәжҢҜеҠЁзўҫеҺӢйҖҹеәҰзәҰдёә5km·h ^-1пјҢеҚ•й’ўиҪ®жҢҜеҠЁеҺӢи·ҜжңәжҢҜеҠЁзўҫеҺӢйҖҹеәҰзәҰдёә3km·h ^-1гҖӮ
еҢәеҹҹеҺӢе®һпјҢеҫҖеӨҚдҪңдёҡ
д»ҘеҢәеҹҹеҺӢе®һдёәзӣ®ж ҮпјҢеҺӢи·ҜжңәиҝҗиЎҢи·қзҰ»зҹӯпјҢзўҫеҺӢж—¶йңҖиҰҒеҜ№жҜҸдёҖзўҫеҺӢйҒ“еҸҚеӨҚзўҫеҺӢеӨҡйҒҚпјҢдҪңдёҡе·ҘеҶөйҮҚеӨҚгҖҒеӨҚжқӮжҖ§дҪҺпјҢдёәдәҶдҝқиҜҒдёҚеҗҢзўҫеҺӢйҒ“д№Ӣй—ҙж— зјқиҝһжҺҘпјҢиҰҒжұӮжңүзўҫеҺӢйҮҚеҗҲеәҰпјҢйҖҡеёёдёҚе°ҸдәҺ12cmгҖӮ
зўҫеҺӢе·Ҙиүәеӣәе®ҡ
еҺӢе®һдҪңдёҡжңҖе…ій”®зҡ„иЎЎйҮҸжҢҮж ҮжҳҜеҺӢе®һеәҰпјҢиҖҢеҪұе“ҚеҺӢе®һеәҰзҡ„еӣ зҙ жңүеЎ«ж–ҷзҡ„еҠӣеӯҰжҖ§иҙЁеҸҠеҗ«ж°ҙйҮҸгҖҒй“әеұӮжқҫй“әеҺҡеәҰд»ҘеҸҠеә•еұӮзҡ„ејәеәҰпјҢдёәж–№дҫҝиҙЁйҮҸжҺ§еҲ¶пјҢйңҖиҰҒе…ҲеҒҡиҜ•йӘҢж®өиҺ·еҫ—жңҖдҪіж–Ҫе·Ҙе·ҘиүәпјҢжӯЈејҸеҺӢе®һж—¶йҖҡиҝҮиҝҮзЁӢжҺ§еҲ¶дҝқиҜҒжңҖз»Ҳз»“жһңгҖӮеҜ№еҺӢи·ҜжңәиҖҢиЁҖпјҢйңҖиҰҒдёҘж јжү§иЎҢзўҫеҺӢж–Ҫе·Ҙе·ҘиүәгҖӮ
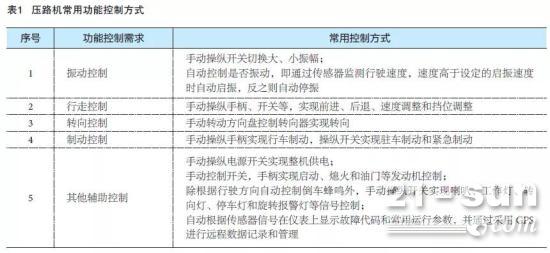
дј з»ҹжҢҜеҠЁеҺӢи·ҜжңәеҠҹиғҪжҺ§еҲ¶еҢ…жӢ¬жҢҜеҠЁжҺ§еҲ¶гҖҒиЎҢиө°жҺ§еҲ¶гҖҒиҪ¬еҗ‘жҺ§еҲ¶гҖҒеҲ¶еҠЁжҺ§еҲ¶еҸҠе…¶д»–иҫ…еҠ©жҺ§еҲ¶пјҢеҰӮж•ҙжңәдҫӣз”өгҖҒеҸ‘еҠЁжңәжҺ§еҲ¶зӯүпјҢеҰӮиЎЁ1жүҖзӨәгҖӮдёҺжұҪиҪҰзӣёжҜ”пјҢжҢҜеҠЁжҺ§еҲ¶жҳҜжҢҜеҠЁеҺӢи·ҜжңәзӢ¬жңүзҡ„гҖӮ
ж— дәәй©ҫ驶жҳҜжҢҮд»Ҙи®Ўз®—жңәдёәдёӯеҝғжһ„е»әзҡ„жҷәиғҪзі»з»ҹпјҢиөӢдәҲи®ҫеӨҮзҺҜеўғж„ҹзҹҘгҖҒ规еҲ’гҖҒиҮӘеҠЁжҺ§еҲ¶зҡ„иғҪеҠӣжқҘе®һзҺ°д»ҝдәәзұ»й©ҫ驶гҖӮ
еҺӢи·Ҝжңәж— дәәй©ҫ驶系з»ҹжһ¶жһ„
ж— дәәй©ҫ驶жҳҜжҢҮд»Ҙи®Ўз®—жңәдёәдёӯеҝғжһ„е»әзҡ„жҷәиғҪзі»з»ҹпјҢиөӢдәҲи®ҫеӨҮзҺҜеўғж„ҹзҹҘгҖҒ规еҲ’гҖҒиҮӘеҠЁжҺ§еҲ¶зҡ„иғҪеҠӣжқҘе®һзҺ°д»ҝдәәзұ»й©ҫ驶[6]пјҢиҰҒе®һзҺ°еҺӢи·Ҝжңәж— дәәй©ҫ驶еҠҹиғҪпјҢж— дәәй©ҫ驶жҺ§еҲ¶зі»з»ҹиҮіе°‘йңҖиҰҒжҺҘз®ЎиЎЁ1дёӯеәҸеҸ·1~4ж¶үеҸҠзҡ„еҺӢи·ҜжңәжҢҜеҠЁгҖҒиЎҢиө°гҖҒиҪ¬еҗ‘е’ҢеҲ¶еҠЁеҠҹиғҪгҖӮжҚ®жӯӨжһ„е»әз®ҖеҚ•еҚ•жңәжҢҜеҠЁеҺӢи·Ҝжңәж— дәәй©ҫ驶系з»ҹжһ¶жһ„пјҢеҰӮиЎЁ2жүҖзӨәпјҢиҜҘжһ¶жһ„еҸҜйҖҡиҝҮжңәиҪҪGPSжҺҘ收жңәгҖҒи§’дҪҚз§»дј ж„ҹеҷЁгҖҒи¶…еЈ°жіўйӣ·иҫҫиөӢдәҲеҺӢи·Ҝжңәж„ҹзҹҘе‘ЁеӣҙзҺҜеўғе’ҢиҮӘиә«зҠ¶жҖҒзҡ„иғҪеҠӣпјҢз»“еҗҲж–Ҫе·ҘеҢәеҹҹдҝЎжҒҜгҖҒзўҫеҺӢж–Ҫе·Ҙе·ҘиүәдҝЎжҒҜиҮӘеҠЁи§„еҲ’иҝӣеңәиҪЁиҝ№гҖҒзўҫеҺӢиҪЁиҝ№е’Ңзә еҒҸжҺӘж–ҪпјҢиҮӘеҠЁжҺ§еҲ¶еҺӢи·ҜжңәиЎҢиө°гҖҒиҪ¬еҗ‘гҖҒжҢҜеҠЁгҖҒйҒҝйҡңеҠҹиғҪпјҢд»ҺиҖҢдҪҝеҺӢи·ҜжңәиғҪе®ҢжҲҗйҷҗе®ҡеҢәеҹҹгҖҒйҷҗе®ҡжқЎд»¶дёӢзҡ„ж— дәәй©ҫ驶гҖӮ
д»ҘдёӢз»“еҗҲеҠҹиғҪе®һзҺ°еҲҶжһҗеҺӢи·ҜжңәеҚ•жңәж— дәәй©ҫ驶系з»ҹжһ¶жһ„зҡ„зү№иүІгҖӮ
еҢәеҹҹе®ҡдҪҚ
еҺӢи·ҜжңәеҜ№еҺӢе®һеҢәеҹҹиҝӣиЎҢе®ҡдҪҚж—¶йңҖиҰҒеҺӢе®һеҢәеҹҹеҗ„жӢҗзӮ№й«ҳзІҫеәҰе®ҡдҪҚеқҗж Ү(з»Ҹзә¬еәҰ)гҖӮиҜҘеқҗж ҮеҸҜд»ҘйҖҡиҝҮй«ҳзІҫеәҰжүӢжҢҒGPSе®ҡдҪҚд»ӘжҲ–иҖ…йҖҡиҝҮеҺӢи·ҜжңәиҮӘиә«зҡ„е®ҡдҪҚеҠҹиғҪйҮҮйӣҶиҺ·еҫ—пјҢзӣёеҜ№иҖҢиЁҖпјҢеҰӮжһңйҖҡиҝҮеҺӢи·ҜжңәиҮӘиә«е®ҡдҪҚеҠҹиғҪйҮҮйӣҶйңҖиҰҒеңЁеҺӢе®һеүҚе°ҶеҺӢи·ҜжңәиЎҢ驶еҲ°жүҖжңүжӢҗзӮ№дёҠи®°еҪ•е®ҡдҪҚеқҗж ҮпјҢиҷҪ然еҸҜд»ҘиҠӮзңҒ1еҸ°й«ҳзІҫеәҰжүӢжҢҒGPSе®ҡдҪҚд»ӘпјҢдҪҶж“ҚдҪңиө·жқҘиҫғдёәз№ҒзҗҗгҖӮ
е®ҡдҪҚ硬件йҮҮз”ЁжңәиҪҪGPSжҺҘ收жңәпјҢдё”еҝ…йЎ»з»“еҗҲGPSеҹәеҮҶеҸ°еҲ©з”Ёе·®еҲҶGPSжҠҖжңҜиҝӣиЎҢе®ҡдҪҚгҖӮжҳҫ然пјҢеҢәеҹҹеҺӢе®һиҰҒжұӮзӣёйӮ»дёӨзўҫеҺӢйҒ“зҡ„зўҫеҺӢйҮҚеҸ йҮҸдёҚе°ҸдәҺ12cmпјҢд»…йҮҮз”ЁжңәиҪҪGPSж—¶е®ҡдҪҚзІҫеәҰдёәзұізә§пјҢеҝ…然еҜјиҮҙзӣёйӮ»зўҫеҺӢйҒ“дёҚйҮҚеҸ иҖҢйҖ жҲҗжјҸеҺӢпјҢиҖҢйҮҮз”Ёе·®еҲҶGPSжҠҖжңҜиғҪе°Ҷе®ҡдҪҚзІҫеәҰзІҫзЎ®еҲ°2cmе·ҰеҸіпјҢе®Ңе…ЁиғҪж»Ўи¶ійҮҚеҸ йҮҸиҰҒжұӮгҖӮ
移еҠЁе®ҡдҪҚ
移еҠЁе®ҡдҪҚе®Ңе…Ёдҫқиө–жңәиҪҪGPSжҺҘ收жңәгҖҒдёҚеҶҚйҮҮз”ЁIMUгҖӮиҝҷжҳҜеӣ дёәеҺӢи·Ҝжңәзҡ„жҢҜеҠЁзўҫеҺӢйҖҹеәҰдёҖиҲ¬дёҚи¶…иҝҮ5 km.h ^-1пјҢиҝңе°ҸдәҺжұҪиҪҰ100 km.h ^-1зҡ„иЎҢ驶йҖҹеәҰпјҢ移еҠЁе®ҡдҪҚзҡ„иҰҒжұӮд№ҹе°ұиҝңдҪҺдәҺжұҪиҪҰгҖӮеҒҮи®ҫGPSе®ҡдҪҚйў‘зҺҮдёә10 HzгҖҒеҺӢи·ҜжңәзўҫеҺӢйҖҹеәҰдёә5 km.h ^-1ж—¶пјҢдёӨж¬Ўе®ҡдҪҚд№Ӣй—ҙеҺӢи·Ҝжңәд»…иЎҢ驶13.8 cmпјҢеҚіеҺӢи·ҜжңәжҜҸиЎҢ驶13.8 cmпјҢж— дәәй©ҫ驶系з»ҹе°ұиғҪж №жҚ®иҮӘиә«жүҖеңЁзҡ„дҪҚзҪ®иҝӣиЎҢдёҖж¬ЎжҺ§еҲ¶пјҲж–№еҗ‘зӣҳиҪ¬и§’пјүи®Ўз®—пјҢиҝҷз§ҚжҺ§еҲ¶йў‘зҺҮдёӢзҡ„иЎҢ驶ж•Ҳжһңе·Іеҹәжң¬иғҪеӨҹж»Ўи¶іеҺӢи·ҜжңәдҪҝз”ЁиҰҒжұӮпјҢж— йңҖеҶҚй…ҚеҗҲйҮҮз”ЁIMUжҸҗй«ҳе®ҡдҪҚйў‘зҺҮгҖӮеҸҰдёҖж–№йқўпјҢеҺӢи·Ҝжңәзҹӯи·қзҰ»иҪ¬иҝҗйҖҹеәҰйҖҡеёёи®ҫе®ҡеңЁ10 km.h ^-1пјҢд»…йҮҮз”ЁжңәиҪҪGPSж—¶еҺӢи·ҜжңәжҜҸиЎҢ驶27.6cmжүҚиғҪиҝӣиЎҢдёҖж¬ЎжҺ§еҲ¶пјҢ移еҠЁзІҫеәҰеҸҜиғҪзЁҚжңүдёҚи¶іпјҢиҖғиҷ‘еҲ°иҪ¬иҝҗж—¶еҸҜд»ҘйҖҡиҝҮдәәе·Ҙй©ҫ驶жҲ–иҖ…йҖҡиҝҮйҷҗе®ҡж— дәәй©ҫ驶зҹӯи·қзҰ»иҪ¬иҝҗйҖҹеәҰиҮі5 km.h ^-1д»ҘдёӢе®һзҺ°пјҢйҷҗе®ҡжқЎд»¶дёӢз®ҖеҚ•еҚ•жңәж— дәәй©ҫ驶系з»ҹеҸҜд»Ҙе®Ңе…Ёдҫқиө–жңәиҪҪGPSжҺҘ收жңәиҝӣиЎҢ移еҠЁе®ҡдҪҚгҖӮ
е§ҝжҖҒж„ҹзҹҘ
еҺӢи·ҜжңәйңҖиҰҒз”ЁGPSжҺҘ收жңәй…ҚеҗҲи§’дҪҚз§»дј ж„ҹеҷЁж„ҹзҹҘе§ҝжҖҒгҖӮйҖҡеёёеҺӢи·ҜжңәйҮҮз”Ёй“°жҺҘиҪ¬еҗ‘иҖҢйқһзұ»дјјжұҪиҪҰзҡ„еүҚиҪ®иҪ¬еҗ‘пјҢеҺӢи·Ҝжңәзҡ„е§ҝжҖҒеҢ…жӢ¬еүҚиҪҰжһ¶е§ҝжҖҒе’ҢеҗҺиҪҰжһ¶е§ҝжҖҒпјҢйңҖиҰҒеҲ©з”Ёеӣәе®ҡеңЁеүҚиҪҰжһ¶дёҠзҡ„2дёӘGPSжҺҘ收жңәиҺ·еҫ—зҡ„дҪҚзҪ®ж•°жҚ®зЎ®е®ҡеүҚиҪҰжһ¶зҡ„дҪҚзҪ®е’ҢиҲӘеҗ‘пјҢйңҖиҰҒеҲ©з”ЁеёғзҪ®еңЁиҪ¬еҗ‘еҚҒеӯ—иҪҙдёҠзҡ„и§’дҪҚз§»дј ж„ҹеҷЁжҲ–иҖ…иҪ¬еҗ‘жІ№зјёдёҠзҡ„дҪҚз§»дј ж„ҹеҷЁжөӢйҮҸеҮәеүҚгҖҒеҗҺиҪҰжһ¶зҡ„еӨ№и§’пјҢд»ҺиҖҢиҺ·еҫ—еҗҺиҪҰжһ¶зҡ„дҪҚзҪ®пјҢиҝӣиҖҢиҺ·еҫ—ж•ҙиҪҰзҡ„е§ҝжҖҒгҖӮ

йҡңзўҚж„ҹзҹҘ
йҡңзўҚж„ҹзҹҘе®Ңе…Ёдҫқиө–и¶…еЈ°жіўйӣ·иҫҫиҺ·еҫ—гҖӮеҺӢи·ҜжңәзўҫеҺӢйҖҹеәҰдёә5km.h ^-1пјҢиҝңе°ҸдәҺжұҪиҪҰ100km.h ^-1зҡ„иЎҢ驶йҖҹеәҰпјҢжҢүж ҮеҮҶиҰҒжұӮпјҢиЎҢ驶йҖҹеәҰ5km.h ^-1ж—¶еҺӢи·ҜжңәеҲ¶еҠЁи·қзҰ»еә”дёҚеӨ§дәҺ2.17mпјҢиҖҢзӣ®еүҚи¶…еЈ°жіўйӣ·иҫҫзҡ„жҺўжөӢи·қзҰ»иғҪиҫҫеҲ°2~4mпјҢйҖүз”ЁжҺўжөӢи·қзҰ»зәҰ4mзҡ„и¶…еЈ°жіўйӣ·иҫҫе°ұеҹәжң¬иғҪж»Ўи¶іеҺӢи·ҜжңәзўҫеҺӢе·ҘдҪңж—¶зҡ„йҒҝйҡңиҰҒжұӮгҖӮзӣёеҜ№иҖҢиЁҖпјҢеӨҡзәҝжҝҖе…үйӣ·иҫҫеҜ№дәҺз©әй—ҙзҡ„жөӢйҮҸйқһеёёзІҫеҮҶпјҢдҪҶ硬件жҲҗжң¬й«ҳжҳӮпјҢз”ЁеңЁеҺӢи·ҜжңәдёҠ并дёҚз»ҸжөҺпјҢиҖҢд»Ҙи§Ҷи§үдёәдё»еҜјзҡ„зӣёжңәгҖҒи¶…еЈ°жіўйӣ·иҫҫж–№жЎҲйңҖиҰҒдё“дёҡзҡ„и§Ҷйў‘гҖҒеӣҫеғҸеҲҶжһҗиҪҜ件пјҢжӣҙйҖӮеҗҲеӨ§и§„жЁЎдә§е“ҒпјҢеӨҡе“Ғз§Қе°Ҹжү№йҮҸеҺӢи·Ҝжңәдә§е“ҒеҲҷж— жі•йҖҡиҝҮеҲҶж‘ҠйҷҚдҪҺжҲҗжң¬гҖӮ
规еҲ’иҪҜ件
йҮҮз”Ё“IF-THEN”еҶізӯ–зі»з»ҹпјҢдҫқйқ е…·дҪ“зҡ„规еҲҷзј–зЁӢгҖӮйҖҡиҝҮиҝӣеңә规еҲ’еҮәеҺӢи·ҜжңәеҪ“еүҚдҪҚзҪ®еҲ°ж–Ҫе·ҘеҢәеҹҹзўҫеҺӢиө·зӮ№й—ҙзҡ„иҝӣеңәиҪЁиҝ№пјҢйҖҡиҝҮзўҫеҺӢ规еҲ’еҮәж–Ҫе·ҘеҢәеҹҹеҶ…зўҫеҺӢиө·зӮ№еҲ°зўҫеҺӢз»ҲзӮ№зҡ„зўҫеҺӢиҪЁиҝ№пјҢ并е°ҶзўҫеҺӢж–Ҫе·Ҙе·ҘиүәиһҚе…ҘеҲ°зўҫеҺӢиҪЁиҝ№дёӯпјҢеҶіе®ҡзўҫеҺӢиҪЁиҝ№зәҝдёҠжҜҸдёҖзӮ№зҡ„зўҫеҺӢж–№ејҸ(йқҷзўҫгҖҒеӨ§жҢҜиҝҳжҳҜе°ҸжҢҜ)пјҢйҖҡиҝҮзә еҒҸ规еҲ’еҮәе®һйҷ…иҪЁиҝ№дёҺйў„и®ҫиҪЁиҝ№еҮәзҺ°е·®ејӮж—¶зҡ„зә еҒҸжҺӘж–ҪпјҢзЎ®и®ӨжҳҜи·ҹиёӘиҲӘеҗ‘иҝҳжҳҜйў„зһ„и·ҹиёӘиҲӘеҗ‘зӯү[7]гҖӮ
дёҺжұҪиҪҰзӣёжҜ”пјҢеҺӢи·ҜжңәдҪңдёҡе·ҘеҶөеӨҚжқӮжҖ§дҪҺпјҢжң¬иҙЁдёҠзўҫеҺӢж–Ҫе·Ҙе·Ҙиүәе°ұжҳҜзўҫеҺӢзҡ„规еҲҷпјҢд»Ҙ规еҲҷдёәеҹәзЎҖпјҢдёҘж јжҢүиҝӣеңә规еҲ’гҖҒзўҫеҺӢ规еҲ’гҖҒзә еҒҸ规еҲ’е®һзҺ°еҫӘиҝ№зўҫеҺӢпјҢ并жҢүйҒҝйҡң规еҲ’жү§иЎҢйҒҝи®©еҹәжң¬иғҪж»Ўи¶ізўҫеҺӢе’ҢйҒҝйҡңиҰҒжұӮпјҢжҺ§еҲ¶жӣҙеҠ з®ҖеҚ•гҖӮеҗҢж—¶пјҢеҹәдәҺж·ұеәҰеӯҰд№ зҡ„зҘһз»ҸзҪ‘з»ңз®—жі•еҜ№ж•°жҚ®дҫқиө–жҖ§жһҒејәпјҢе°ҡеӨ„дәҺеҲқзә§йҳ¶ж®өзҡ„еҺӢи·Ҝжңәж— дәәй©ҫ驶е°ҡжңӘз§ҜзҙҜи¶іеӨҹзҡ„ж•°жҚ®пјҢзҺ°йҳ¶ж®өзҘһз»ҸзҪ‘з»ңз®—жі•еңЁеҺӢи·ҜжңәдёҠ并дёҚйҖӮз”ЁгҖӮ
规еҲ’硬件
йҮҮз”Ёе·ҘжҺ§жңәпјҢеҲ©з”ЁжҖ»зәҝз»“жһ„е’ҢеҺӢи·ҜжңәдёҠзҡ„жҺ§еҲ¶еҷЁиҝһжҺҘдёӢеҸ‘еҗ„з§ҚжҺ§еҲ¶жҢҮд»ӨпјҢжҺҘз®ЎиЎҢиө°гҖҒиҪ¬еҗ‘гҖҒжҢҜеҠЁгҖҒеҲ¶еҠЁеҠҹиғҪгҖӮ
еә•еұӮжҺ§еҲ¶ж–№йқўйҮҮз”ЁеҹәдәҺ规еҲ’-и·ҹиёӘзҡ„й—ҙжҺҘжҺ§еҲ¶пјҢжү§иЎҢ硬件жҺҘ收жҺ§еҲ¶еҷЁдёӢеҸ‘зҡ„еҗ„з§ҚжҺ§еҲ¶дҝЎеҸ·пјҢиҜҘеүҚиҝӣеүҚиҝӣгҖҒиҜҘеҲ№иҪҰеҲ№иҪҰгҖҒиҜҘиҪ¬еҗ‘иҪ¬еҗ‘гҖҒиҜҘеӨ§жҢҜеӨ§жҢҜпјҢе®һзҺ°ж— дәәй©ҫ驶гҖӮ

йҖҡиҝҮеҜ№дј з»ҹеҺӢи·ҜжңәдҪҝз”Ёзү№зӮ№гҖҒеҠҹиғҪжҺ§еҲ¶йңҖжұӮиҝӣиЎҢеҲҶжһҗпјҢиҺ·еҫ—дёҖз§Қж— дәәй©ҫ驶еҺӢи·ҜжңәеҚ•жңәзі»з»ҹжһ¶жһ„пјҢ并结еҗҲеҺӢи·Ҝжңәжң¬иә«зү№зӮ№е’ҢеҠҹиғҪе®һзҺ°еҲҶжһҗдәҶеҺӢи·ҜжңәеҚ•жңәж— дәәй©ҫ驶系з»ҹжһ¶жһ„зҡ„зү№иүІпјҢжҸҗеҮәеҺӢи·Ҝжңәе®һзҺ°ж— дәәй©ҫ驶еҠҹиғҪзҡ„еҹәжң¬иҰҒжұӮпјҡе·®еҲҶGPSжҠҖжңҜгҖҒи§’дҪҚз§»дј ж„ҹеҷЁгҖҒи¶…еЈ°жіўйӣ·иҫҫе’Ң“IF-THEN”еҶізӯ–зі»з»ҹзӯүгҖӮ
жү§иЎҢ硬件
дјҳйҖүз”өжҺ§зЎ¬д»¶пјҢе…¶дёӯиЎҢиө°йҖҹеәҰе’ҢиҪ¬еҗ‘и§’еәҰйңҖиҰҒж— зә§и°ғж•ҙпјҢйҮҮз”Ёз”өжҺ§жҜ”дҫӢжіөе’Ңз”өжҺ§жҜ”дҫӢиҪ¬еҗ‘йҳҖпјҢжҢҜеҠЁжңүдёҚжҢҜгҖҒеӨ§жҢҜе’Ңе°ҸжҢҜдёүз§ҚйҖүжӢ©гҖӮйҖүз”ЁејҖе…ійҮҸзҡ„з”өжҺ§дёӨзӮ№жҢҜеҠЁжіөпјҢеҲ¶еҠЁжңүеҮҸйҖҹе’Ңзҙ§жҖҘеҲ¶еҠЁдёӨз§Қж–№ејҸпјҢеҮҸйҖҹйҖҡиҝҮжҺ§еҲ¶з”өжҺ§жҜ”дҫӢжіөзҡ„жҺ’йҮҸе®һзҺ°пјҢзҙ§жҖҘеҲ¶еҠЁйҖҡиҝҮеҲ¶еҠЁеҷЁзҡ„ејҖеҗҜе’Ңй—ӯеҗҲе®һзҺ°гҖӮ
е…¶д»–иҫ…еҠ©жҺ§еҲ¶ж–№йқўпјҢж•ҙжңәдҫӣз”өгҖҒеҸ‘еҠЁжңәжҺ§еҲ¶зӯүеқҮйңҖиҰҒдәәе·Ҙиҫ…еҠ©пјҢеҗҢзҺ°жңүеҺӢи·ҜжңәгҖӮдҝЎеҸ·жҺ§еҲ¶е’ҢиҝҗиЎҢзҠ¶жҖҒеңЁж— дәәй©ҫй©¶ж—¶ж— жҳҫзӨәпјҢеңЁдәәе·Ҙй©ҫ驶时еҗҢзҺ°жңүеҺӢи·ҜжңәгҖӮ
еҲ°иҫҫеұұйЎ¶пјҢжҖ»жңүеҮ жқЎи·ҜеҸҜд»ҘйҖүжӢ©пјҢж— дәәй©ҫ驶д№ҹжҳҜгҖӮйҖӮз”ЁдәҺдёҚеҗҢе·ҘеҶөпјҢеҸҜд»ҘйҖүз”ЁдёҚеҗҢзҡ„ж— дәәй©ҫ驶方жЎҲпјҢеҪўжҲҗдёҚеҗҢзҡ„ж— дәәй©ҫ驶系з»ҹжһ¶жһ„гҖӮж— дәәй©ҫ驶жҠҖжңҜж–№жЎҲзҡ„жҲҗжң¬дёҚеҗҢпјҢе…¶жҷәиғҪеҢ–зЁӢеәҰд№ҹжңүдёҚеҗҢгҖӮжҳҫ然пјҢжӣҙжҷәиғҪзҡ„ж— дәәй©ҫ驶еҺӢи·ҜжңәеҸҜд»Ҙе°ҶиЎЁ1дёӯеәҸеҸ·5ж¶үеҸҠзҡ„иҫ…еҠ©жҺ§еҲ¶зәіе…Ҙзӣ‘жҺ§пјҢеҰӮе°Ҷж•ҙжңәдҫӣз”өгҖҒеҸ‘еҠЁжңәжҺ§еҲ¶зәіе…ҘиҮӘеҠЁжҺ§еҲ¶д»ҘеҮҸе°‘дәәе·Ҙе№Ійў„пјҢе°ҶеҺӢи·ҜжңәиҝҗиЎҢзҠ¶жҖҒзәіе…Ҙзӣ‘жҺ§йҒҝе…Қи®ҫеӨҮеёҰз—…иҝҗиЎҢгҖӮеҸҜд»Ҙе°ҶеәҸеҸ·1~4ж¶үеҸҠзҡ„еҺӢи·ҜжңәжҢҜеҠЁгҖҒиЎҢиө°гҖҒиҪ¬еҗ‘е’ҢеҲ¶еҠЁеҠҹиғҪиҝӣдёҖжӯҘе®Ңе–„пјҢеҰӮеҸҜд»ҘйҮҮз”ЁIMUжҸҗй«ҳ移еҠЁе®ҡдҪҚзІҫеәҰпјҢд»ҘйҖӮеә”иЎҢ驶йҖҹеәҰ5km.h ^-1д»ҘдёҠзҡ„иҪ¬иҝҗе·ҘеҶөпјҢеҸҜд»ҘйҮҮз”ЁжҝҖе…үйӣ·иҫҫиҺ·еҫ—жӣҙиҝңи·қзҰ»зҡ„йҡңзўҚдҝЎжҒҜпјҢдҪҝеҲ¶еҠЁиҝҮзЁӢжӣҙеҠ е№ізЁіпјҢд»ҺиҖҢеҮҸе°‘еҲ¶еҠЁеҜ№и®ҫеӨҮзҡ„еҶІеҮ»е№¶дҪҝи®ҫеӨҮиҝҗиЎҢжӣҙеҠ е®үе…ЁгҖӮеҸҜд»Ҙе°ҶжӣҙеӨҡзҡ„дәәе·Ҙж“ҚдҪңзәіе…ҘжҺ§еҲ¶пјҢеҰӮз»“еҗҲдә‘з«Ҝең°еӣҫдҪҝеҺӢи·ҜжңәиҮӘеҠЁиҝӣе…ҘеҠ жІ№зӮ№еҠ жІ№жҲ–иҝӣе…ҘжЈҖдҝ®зӮ№жЈҖдҝ®пјҢз»“еҗҲиҝңзЁӢйҒҘжҺ§зі»з»ҹиҝӣиЎҢиҝңзЁӢйҒҘжҺ§иҖҢе°Ҷй©ҫ驶е®Өе®Ңе…ЁеҸ–ж¶ҲзӯүгҖӮ
з»“иҜӯ
йҡҸзқҖжҠҖжңҜзҡ„иҝӣжӯҘпјҢж— дәәй©ҫ驶е°Ҷеҫ—еҲ°йЈһйҖҹеҸ‘еұ•пјҢжң¬ж–ҮйҖҡиҝҮеҜ№дј з»ҹеҺӢи·ҜжңәдҪҝз”Ёзү№зӮ№гҖҒеҠҹиғҪжҺ§еҲ¶йңҖжұӮиҝӣиЎҢеҲҶжһҗпјҢиҺ·еҫ—дёҖз§Қж— дәәй©ҫ驶еҺӢи·ҜжңәеҚ•жңәзі»з»ҹжһ¶жһ„пјҢ并结еҗҲеҺӢи·Ҝжңәжң¬иә«зү№зӮ№е’ҢеҠҹиғҪе®һзҺ°еҲҶжһҗдәҶеҺӢи·ҜжңәеҚ•жңәж— дәәй©ҫ驶系з»ҹжһ¶жһ„зҡ„зү№иүІпјҢжҸҗеҮәеҺӢи·Ҝжңәе®һзҺ°ж— дәәй©ҫ驶еҠҹиғҪзҡ„еҹәжң¬иҰҒжұӮпјҡе·®еҲҶGPSжҠҖжңҜгҖҒи§’дҪҚз§»дј ж„ҹеҷЁгҖҒи¶…еЈ°жіўйӣ·иҫҫе’Ң“IF-THEN”еҶізӯ–зі»з»ҹзӯүгҖӮ